如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
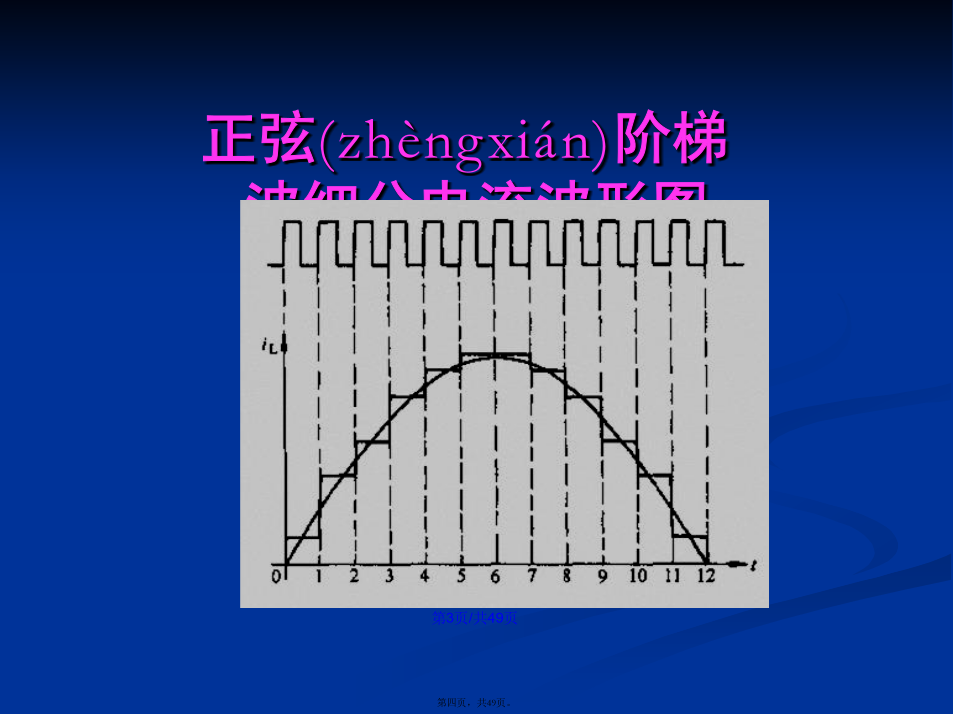
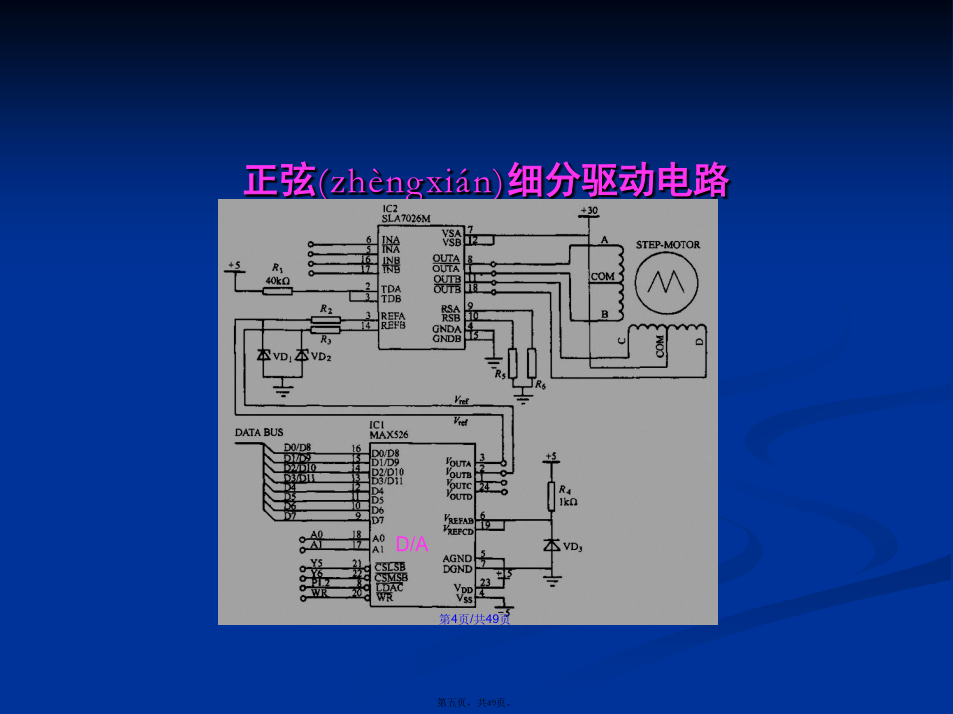
会计学3.细分控制1)从8位单片机送出的数据D~D,数值00H~0FFH,对应与十进制数是0~255.细分时,要求每个阶梯的电流差值相等,即要求细分步数必须能对255整除,显然细分只能为3,5,15,17,51,85几种。2)一般按正弦规律变化细分的多相电流,合成磁势幅值保持(bǎochí)不变,转角细分精确;3)通过细分驱动可得到更小的脉冲当量,提高了定位精度;4)绕组电流均从小增到大,或从大降到小,避免了电流冲击,基本消除了步进电机低速振动,电机低速运转平稳,无噪声。步进电机的细分控制得到了广泛应用。四相步进电机线型规律细分电流(diànliú)时序图正弦(zhèngxián)阶梯波细分电流波形图正弦(zhèngxián)细分驱动电路功率步进电机用作开环进给系统的伺服驱动装置,组成开环进给系统,一般技术性能不能满足使用要求,其性能的提高受到限制。60年代出现了小惯量直流伺服电机,70年代初出现了大惯量宽调速伺服电机;目前,许多数控机床(shùkònɡjīchuánɡ)采用大惯量直流伺服电机。直流电机的用途(yòngtú)定子(dìngzǐ)和转子直流电机电枢绕组(ràozǔ)结构直流电机电刷和换向器结构(jiégòu)直流电机电刷结构(jiégòu)直流电机的物理(wùlǐ)模型6.3.1直流伺服电机调速控制直流伺服电机有电磁式、永磁式、杯形电枢式、无槽电枢式、无刷式等。直流伺服电机的结构与直流电机相同,由定子和转子两部分组成。在定子上装有磁极,电磁式伺服电机的定子磁极上有励磁绕组。转子由硅钢片迭积而成,转子上外圆有槽,槽内有中枢绕组,绕组通过换向器和电刷引出。直流伺服电机和普通电机最大区别:电枢长度与直径之比(L/D)比普通直流电机要大;气隙较小。伺服电机的工作原理和普通直流电机相同,当定子中的磁励磁通和转子中的电流相互作用时,会产生电磁转矩驱动电枢转动,恰当地控制转动电枢电流的大小和方向(fāngxiàng),就可以控制伺服电机转向及转速,当电枢电流“0”,伺服电机停滞不动。即定子磁势Fr垂直于电枢(diànshū)绕组磁势Ff→产生电磁转矩T电磁转矩为:T=CmφIa式中:Cm——转矩常数(Cm=PN/(2πa)p:磁极对数N:电枢绕组总导体数a:并联支路对数Φ——电机的主磁通Ia——电枢电流电压平衡(pínghéng)方程为:E=Ud-IaRa(Ud:电枢电压Ud=Uc=U控制电压)式中:E——电枢感应电动势E=CeΦnCe=PN/(60a)联立上三式得到从上式知,电机调速有三种方法(fāngfǎ):1)改变电枢电压U(电枢法)2)改变励磁磁通Φ(弱磁调速)3)在电枢回路中接电阻Rt改变(gǎibiàn)端电压调速(1)降压的特性是一簇与固有(gùyǒu)特性平行的直线,无论是满载、轻载还是空载都有明显的调速效果。弱磁调速弱磁调速特点(tèdiǎn)改变电枢(diànshū)回路电阻调速串电枢(diànshū)电阻调速6.3.2直流伺服电机/2.动特性定义:电枢加上阶跃电压时,转子速度随时间的变化规律为为伺服电机的动特性。n=f(t)动特性的本质是由过渡过程来描述的。产生过渡过程的原因在于电机存在两种惯性:机械惯性和电磁惯性。机械惯性:由于电机和负载都有惯量(guànliàng),故转速n不能突变,转动惯量(guànliàng)J是造成机械过渡过程的原因。电磁惯性:由于电机绕组有电感,故电枢电流不能突变,电感式造成电磁惯性的原因。机械惯性和电磁惯性相互影响,构成了电机总过渡过程,一般电磁过渡过程比机械过渡过程短,可忽略。考虑到电感对电枢电流的影响,故动态电压平衡方程为:式中:La——电枢电感在过渡过程中,电磁转矩T除了要克服轴上的总的阻转矩T外,还要克服轴上的惯性力矩,故转矩平衡方程为:式中:Ts---总阻转矩;J---电机(diànjī)及负载的等效转动惯量;ω---转子的角速度。但过渡过程中,T主要用来克服Jdω/dt,Ts所占比例很小,可忽略。所以,式中:τj——机电时间(shíjiān)常数,表示加上电枢电压后,转速达到额定值过程时间(shíjiān)的过渡。τd——电磁时间(shíjiān)常数,表示加上电枢电压后,电枢电流达到额定值的过渡过程时间(shíjiān)。由于τd<<τj,均可忽略,直流伺服电机传递函数G(s)是输出(shūchū)转速与输入电枢电压拉氏变换之比,即从式中知,当t=τj时,n=0.632n0,上升(shàngshēng)到n0的时间当t=3τj时,n=0.95n0,此时过渡过程基本结束,即t=3τj。小结:机械特性(tèxìng)的斜率K减小,特性(tèxìng)硬,则电机