如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
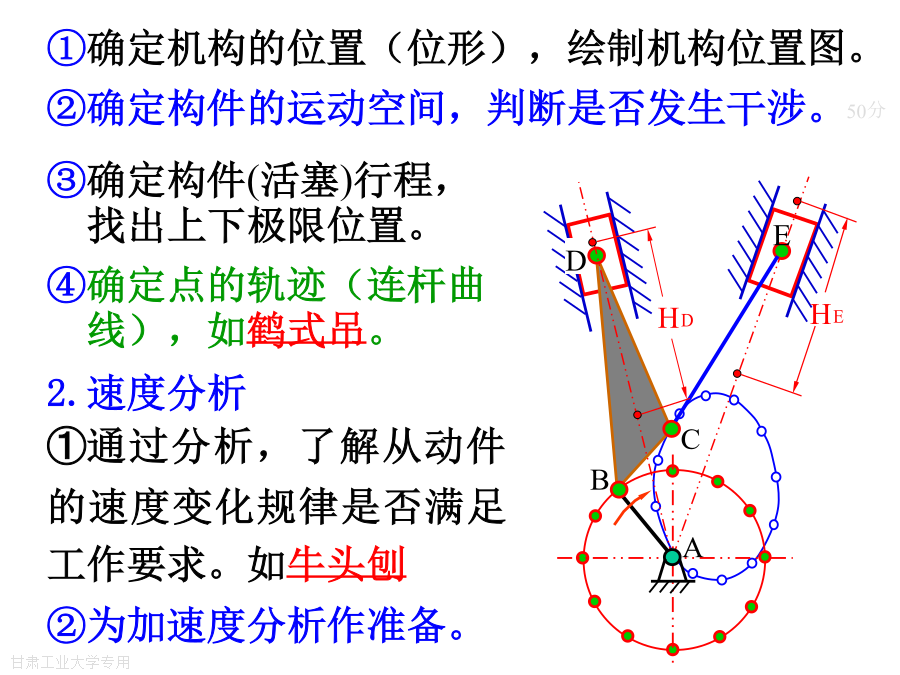
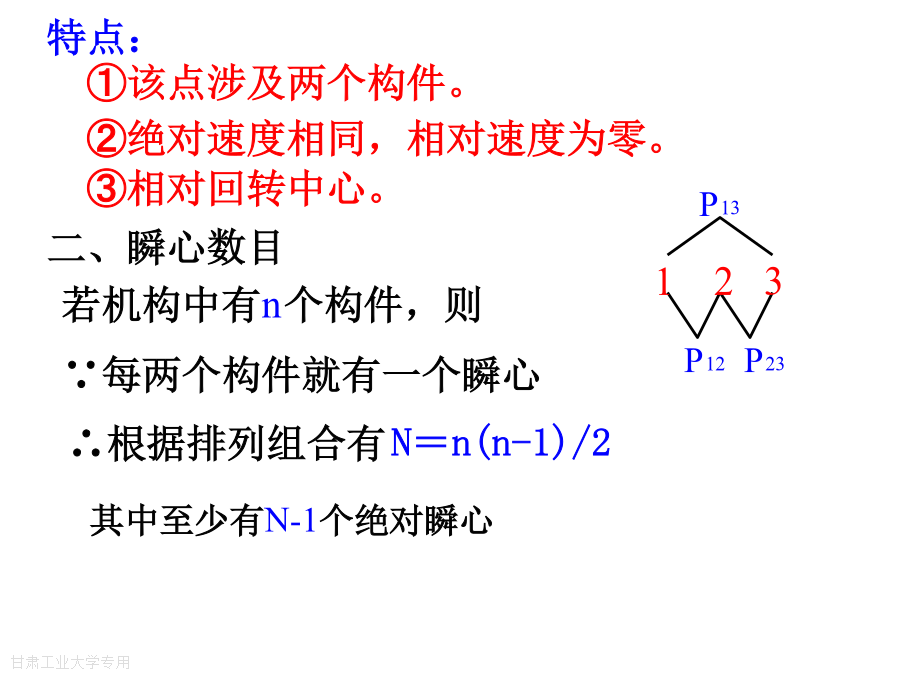
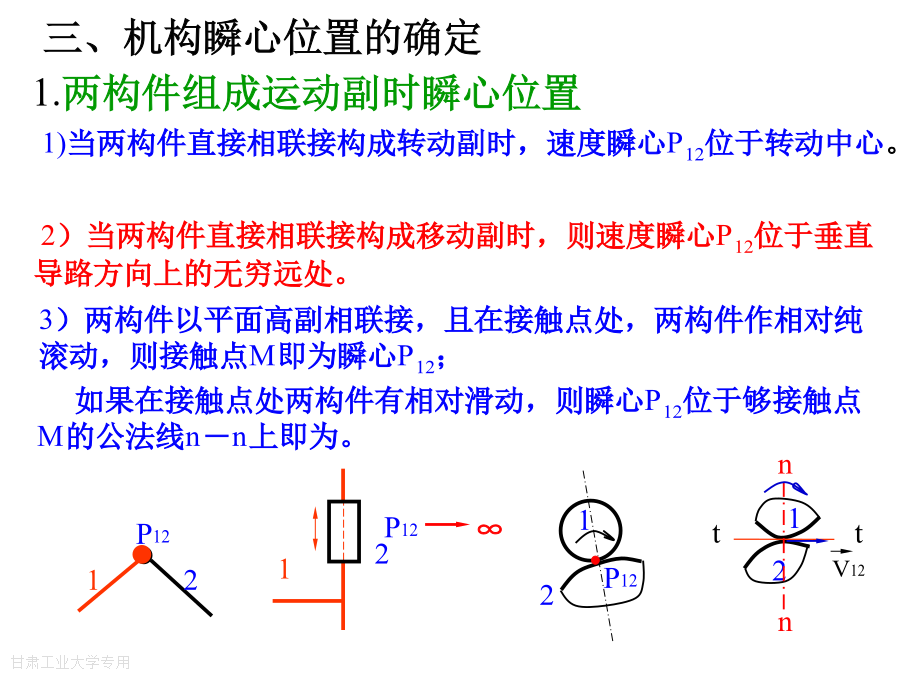
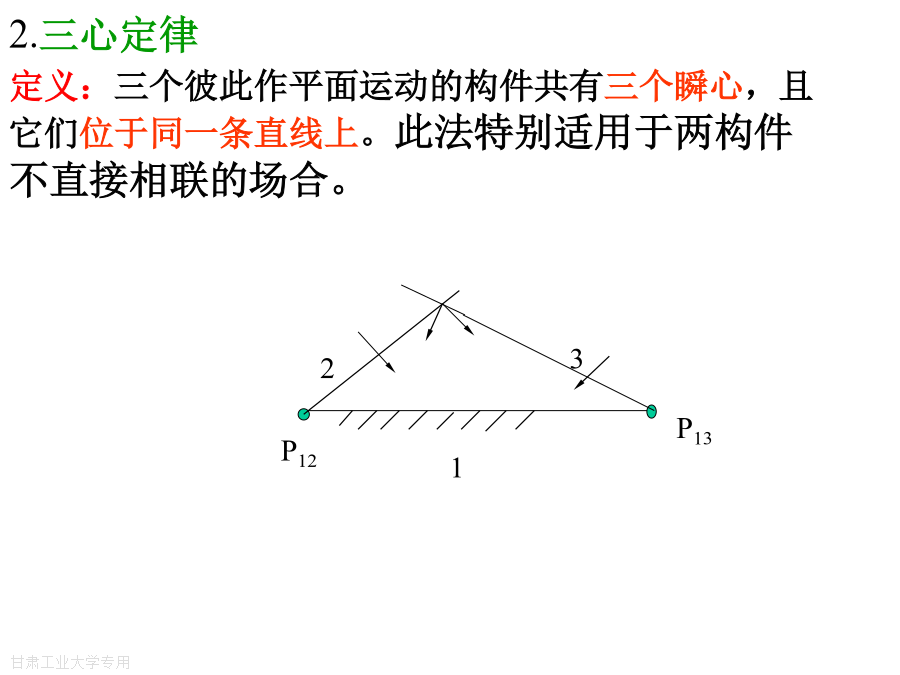
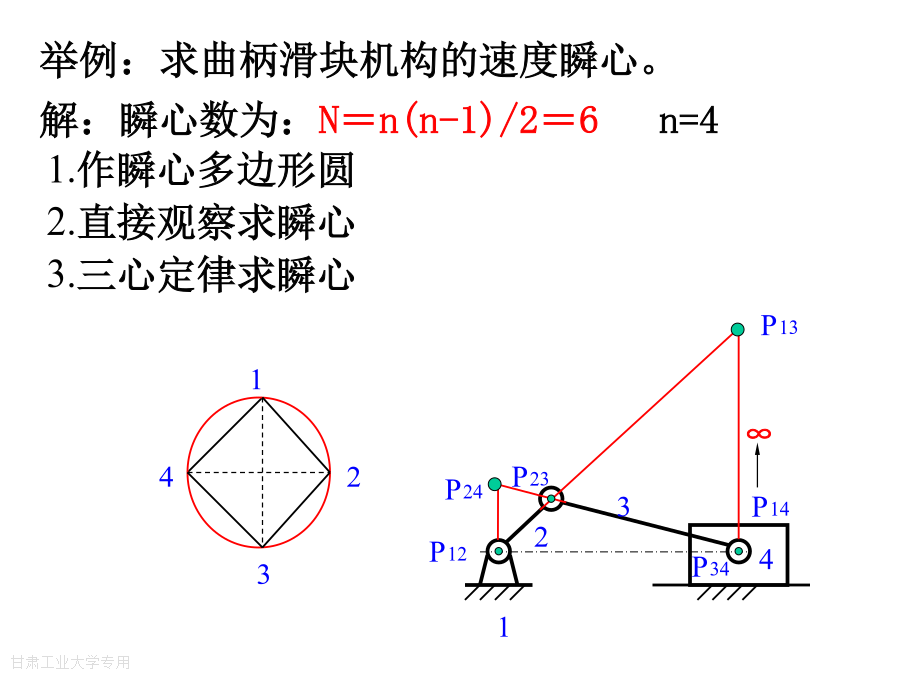
第三章平面机构的运动分析所谓机构运动分析,就是不考虑引起机构的外力、构件变形、运动副中的间隙等因素,仅从几何的角度研究已知原动件的运动规律时,如何求其他构件的运动参数,如点的轨迹、构件位置、速度和加速度等。①确定机构的位置(位形),绘制机构位置图。3.加速度分析的目的是为确定惯性力作准备。§3-2速度瞬心及其在机构速度分析中的应用特点:①该点涉及两个构件。②绝对速度相同,相对速度为零。③相对回转中心。12.三心定律举例:求曲柄滑块机构的速度瞬心。1四、速度瞬心在机构速度分析中的应用2.求角速度。b)高副机构已知构件2的转速ω2,求构件3的角速度ω3。14.用瞬心法解题步骤CC2.同一构件上两点速度和加速度之间的关系cA速度多边形的性质:速度多边形的用途:由两点的速度求任意点的速度。2)加速度关系b”角加速度:α=atBA/lAB②联接任意两点的向量代表该两点在机构图中同名点的相对加速度,指向与速度的下标相反。如a’b’代表aBA而不aAB,常用相对切向加速度来求构件的角加速度。B②加速度关系二、用矢量方程图解法作机构速度和加速度分析利用速度影象与构件相似的原理,可求得影象点e。图解上式得p’c’b’:aC=μap’c’bQ3AA2.正确判哥式加速度的存在及其方向A§3-5用解析法作机构的运动分析(一)铰链四杆机构如图所示为一铰链四杆机构。设已知各构件各构件的杆长L1、L2、L3、L4,及原动件的瞬时位置角φ1,若原动件1以ω1(常数)等角速度转动,现求图示位置中的点C的速度υC和加速度aC,以及构件2、3的角速度ω2、ω3和角加速度α2、α3。一、机构的位移分析解之得:三、机构的加速度分析#include“stdio.h”#include“math.h”main(){floatab=0.2,bc=0.4,cd=0.35,ad=0.5,pi=3.1415926;floatw1=10,w2,w3,e1,e2,e3,r,k,a,b,c,p1,p2,p3,t,t1,t2,t3;r=(bc*bc-cd*cd-(ad-ad)*(ab-ab)/(2*cd*(ad-ab));p3=atan(sqrt(1-r*r)/r);if(p3<0)p3=p3+pi;printf(“p1\tp2\tp3\tw2\tw3\te2\te3\n”);for(p1=0;p1<=2*pi;p1+=pi/6){t=ad*ad+cd*cd+ab*ab-bc*bc;a=-sin(p1);b=ad/ab-cos(p1);c=t/(2*ab*cd)-ad/cd*cos(p1);t1=2*atan((a+sqrt(a*a+b*b-c*c))/(b-c));t2=2*atan((a-sqrt(a*a+b*b-c*c))/(b-c));if(fabs(t1-p3)<fabs(t2-p3))p3=t1;elsep3=t2;p2=atan((cd*sin(p3)-ab*sin(p1))/(ad+cd*cos(p3)-ab*cos(p1)));w2=-ab*sin(p1-p3)*w1/(bc*sin(p2-p3));w3=ab*sin(p1-p2)*w1/(cd*sin(p3-p2));e2=(ab*w1*w1*cos(p1-p3)+bc*w2*w2*cos(p3-p2)-cd*w3*w3)/(bc*sin(p3-p2));e2=(ab*w1*w1*cos(p1-p2)+bc*w2*w2-cd*w3*w3*cos(p3-p2))/(cd*sin(p3-p2));k=180/pi;printf(“%4.0f\t%7.3f\t%7.3f\t%7.3f\t%7.3f\t%7.3f\t%7.3f\n”,p1*k,p2*k,p3*k,w2,w3,e2,e3);}getch();}jj求一阶导数有:2.平面机构的运动分析整理后得:Asinθ3+Bcosθ3+C=0(4)整理后得:Dsinθ2+Ecosθ2+F=0(8)-ω2l2sin(θ2-θ3)=ω1l1sin(θ1-θ3)二、矩阵法2.速度分析将(14)式对时间求导得:3.加速度分析将(17)式对时间求导得以下矩阵方程:解析法作机构运动分析的关键:正确建立机构的位置方程。至于速度分析和加速度分析只不过是对位置方程作进一步的数学运算而已。本例所采用的分析方法同样适用复杂机构。全部为转动副本章重点:1、速度瞬心是两刚体上______________为零的点,当该点的_________为零则为绝对瞬心。2、由N个构件组成的平面机构共有__________个速度瞬心,其中至少_______个绝对瞬心。3、铰链四杆机构中,共有________个瞬心,其中至少_____个绝对瞬心