如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
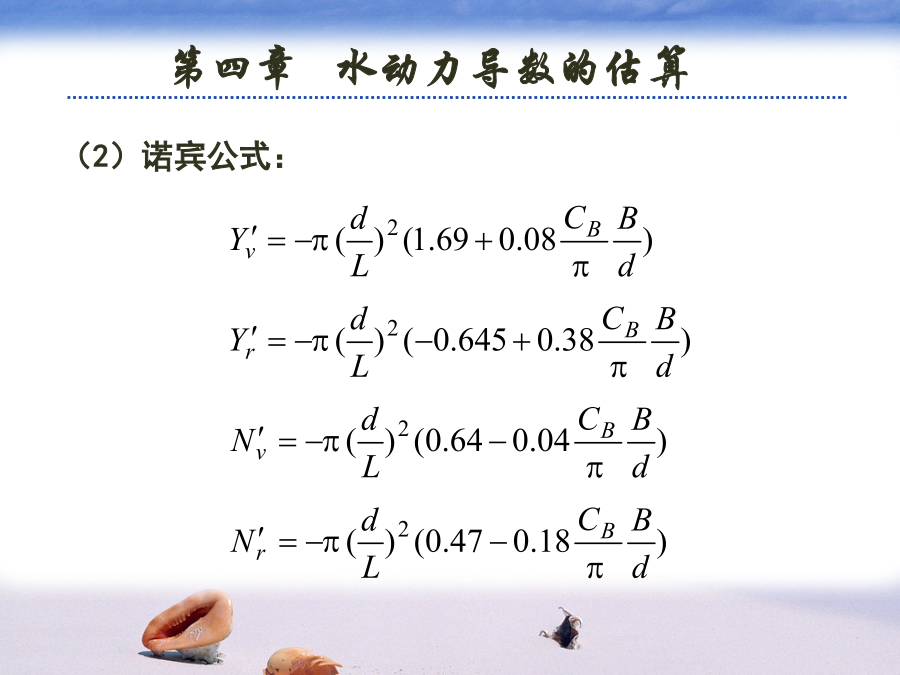
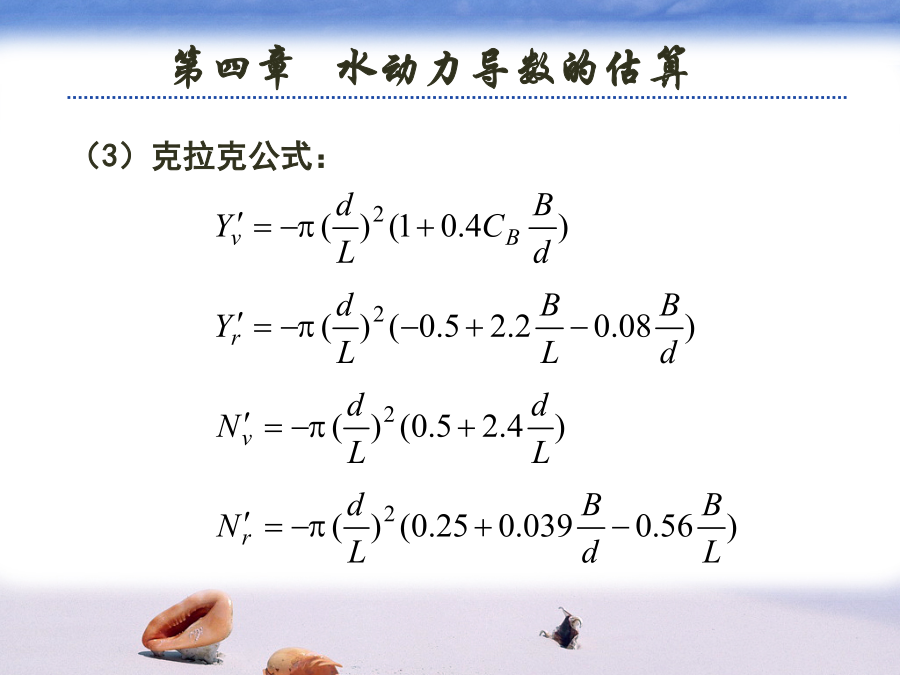
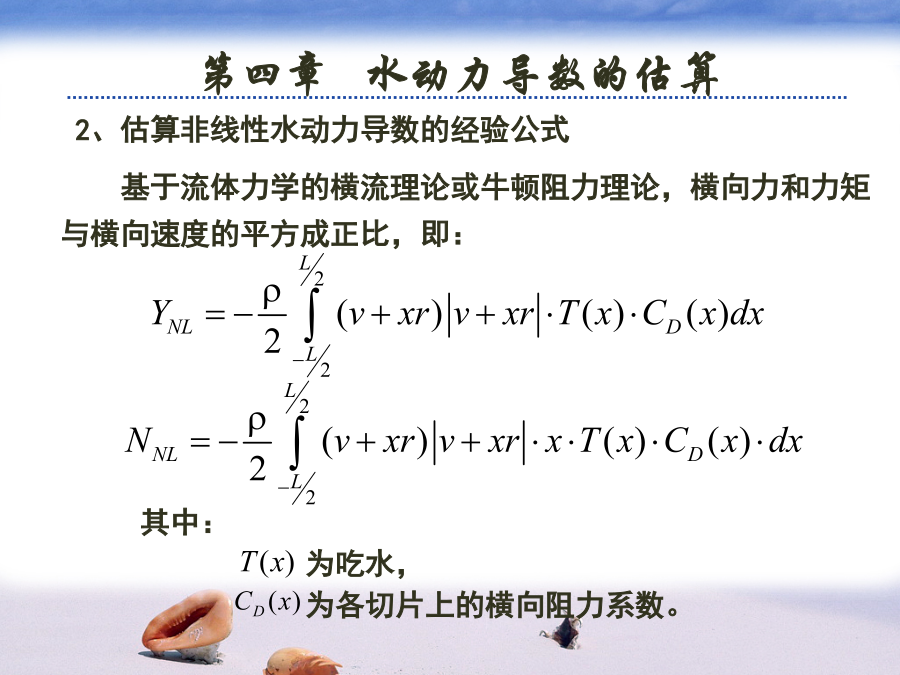
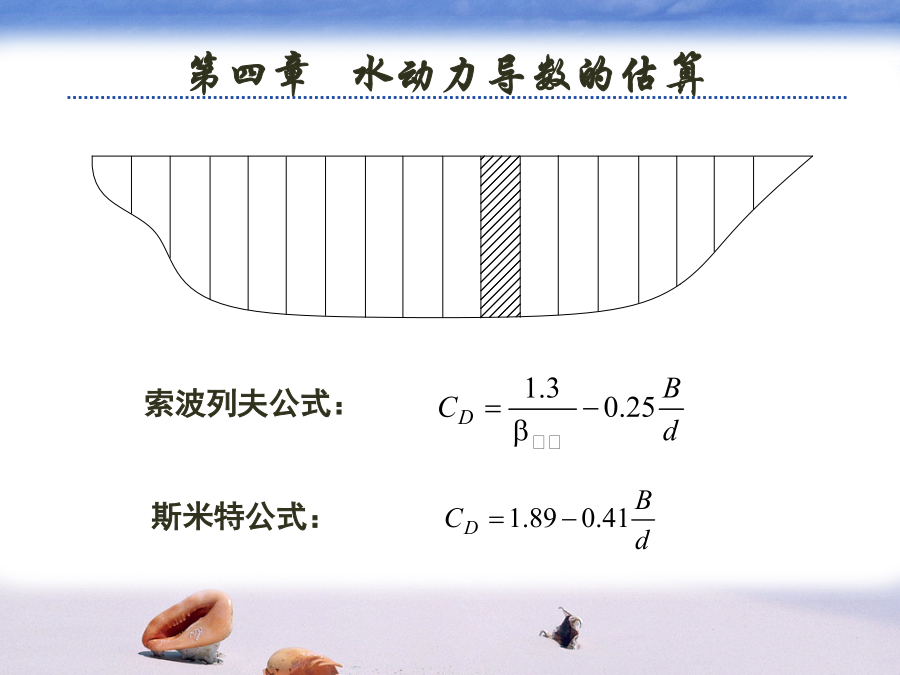
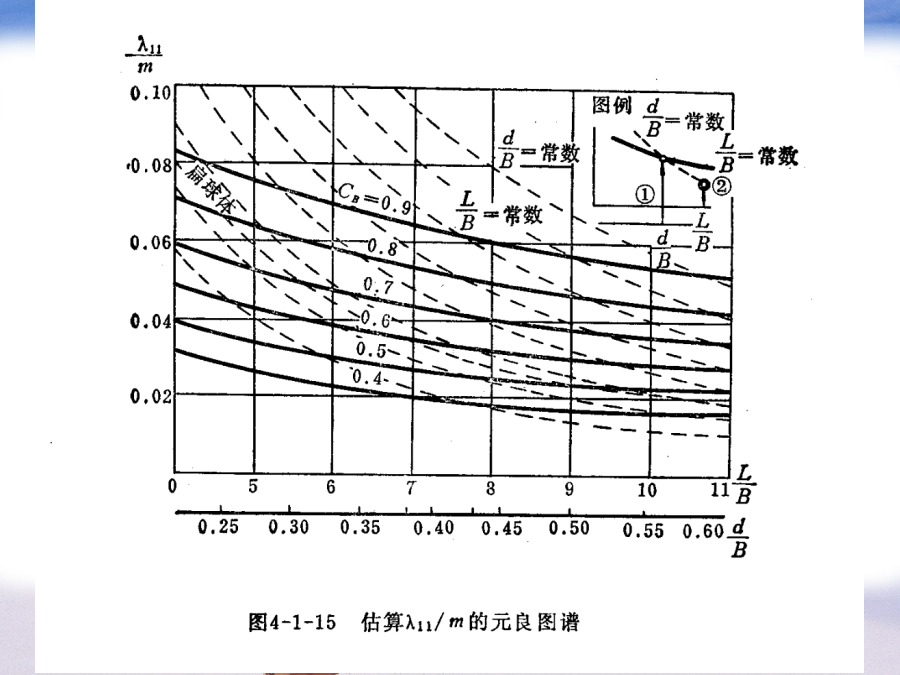
第四章水动力导数的估算水动力导数的估算方法有两种:(2)诺宾公式:(3)克拉克公式:其中:为吃水,为各切片上的横向阻力系数。索波列夫公式:3、估算附加质量的图谱方法元良诚三根据系列船模试验的结果,给出了估算船体附加质量的图谱,对于一般民船来说,估算精度较好。为了便于计算机计算,以将上述图谱回归成如下多项式:二、理论计算方法目前,理论计算方法主要用于利用理想流体理论计算物体的附加质量等水动力导数,对于与粘性有关的水动力导数还没有较好的理论计算方法。1、简单几何形体的附加质量(1)椭球兰伯用势流理论导出了长轴为2a,短轴为2b和2c的椭球的附加质量和附加转动惯量:兰伯将船体看成是三轴为L,B,2d的椭球,并结果整理成曲线,其中:例:球体附加质量的计算:(2)二维椭圆柱体对于如左上图的二维椭圆柱体,有:(3)二维平板对于如左下图的二维平板,有:椭圆、平板的附加质量公式可用来近似估算舵、托架和舭龙骨等附体的附加质量。但于船体的附加级两相比较,附体的附加质量较小,在操纵性计算中一般常略去机器人在无界水域中的附加质量1.主体部分的附加质量:小机器人采用Gambit2.0进行建模,并根据实际情况,做一些简化,省去了水平翼、垂直翼、推力器等一些部件,简化后的模型网格如下图所示。在其表面不等距地划分了1158个网格,中部曲率变化缓慢,网格分得较疏,而在首尾部,曲率变化大的地方,分得较密。代入面元法程序得,可得机器人主体部分平动时的附加质量。2.附体部分的附加质量:1)前水平翼:(左右各一个)2)后水平翼:(左右各一个)3)后垂直翼:(上下各一个)4)推进器及其它一些附件。因尺度较小且形状复杂,很难精确地算出附加质量,这里略去它们对整体的影响。综上所述,将它们叠加起来即可算出机器人在无界水域中运动(仅平动)的附加质量。