如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
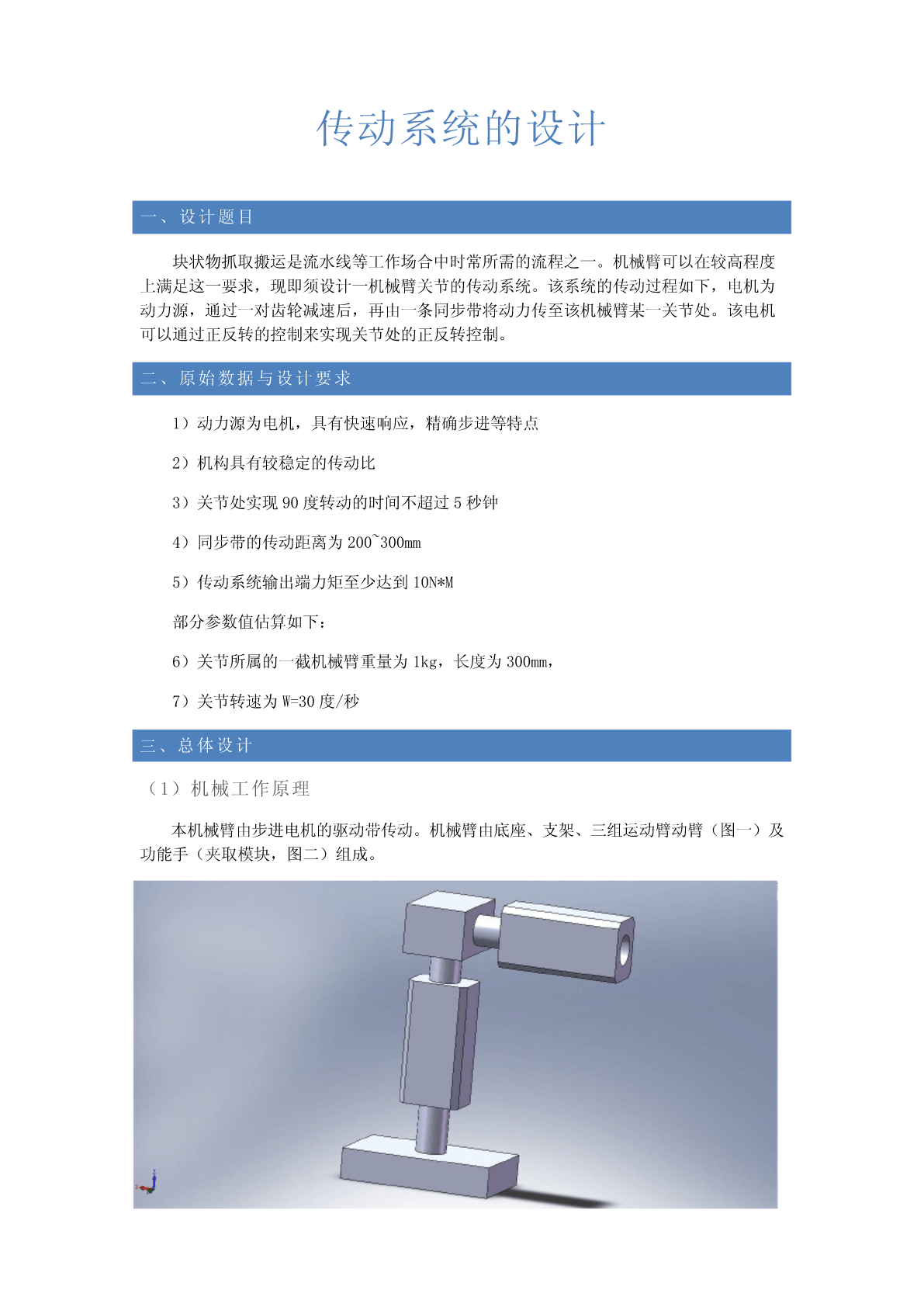
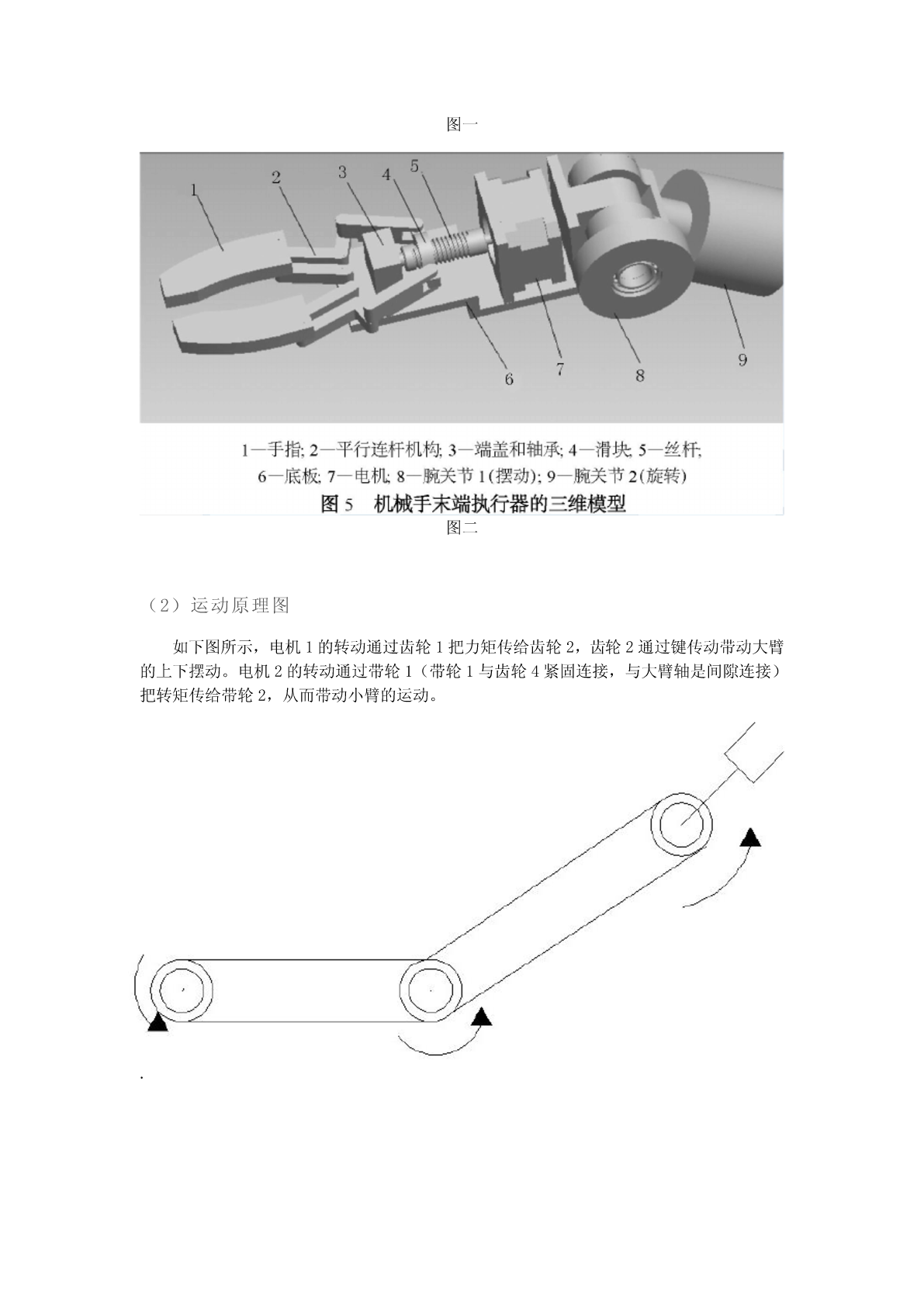
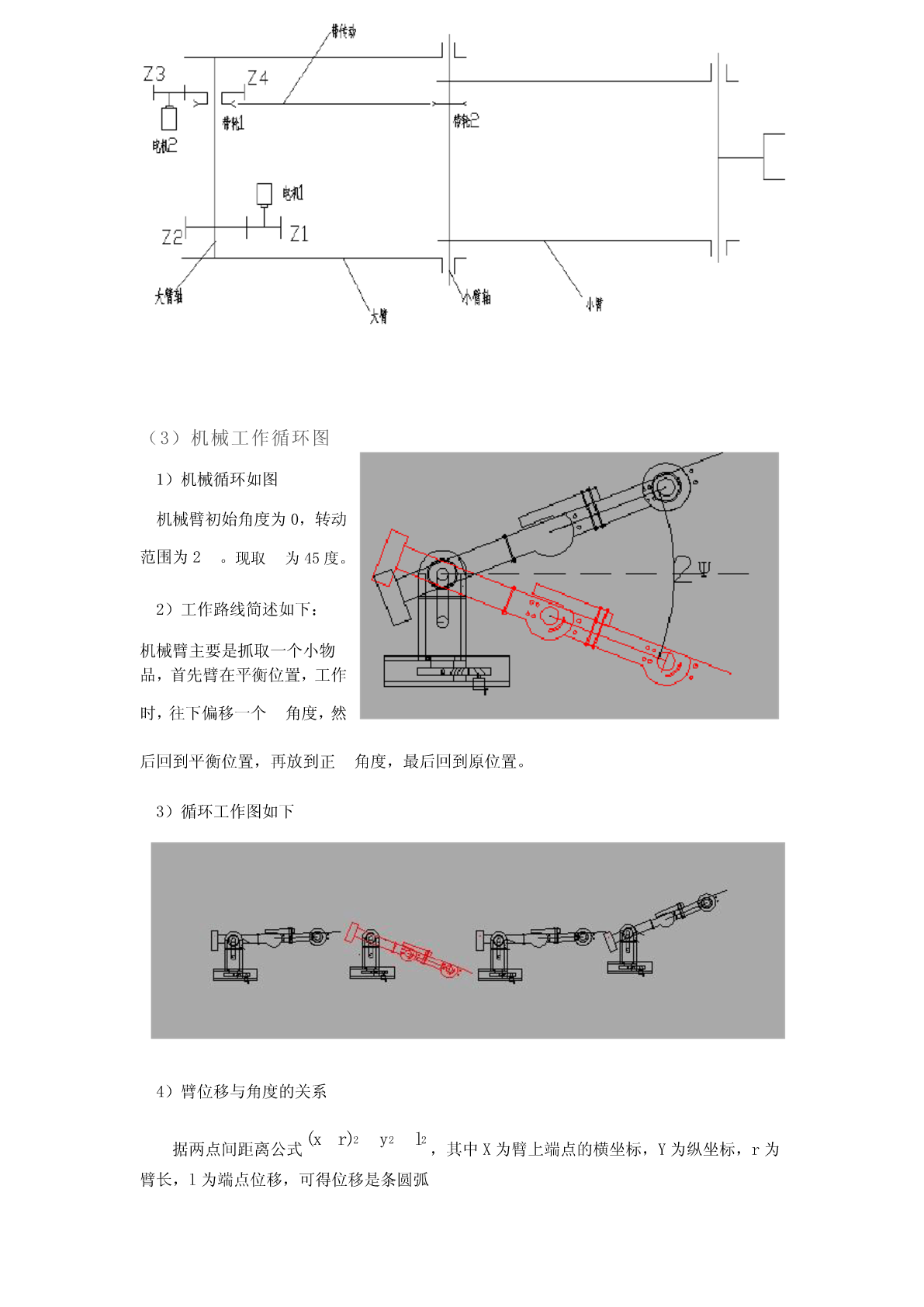
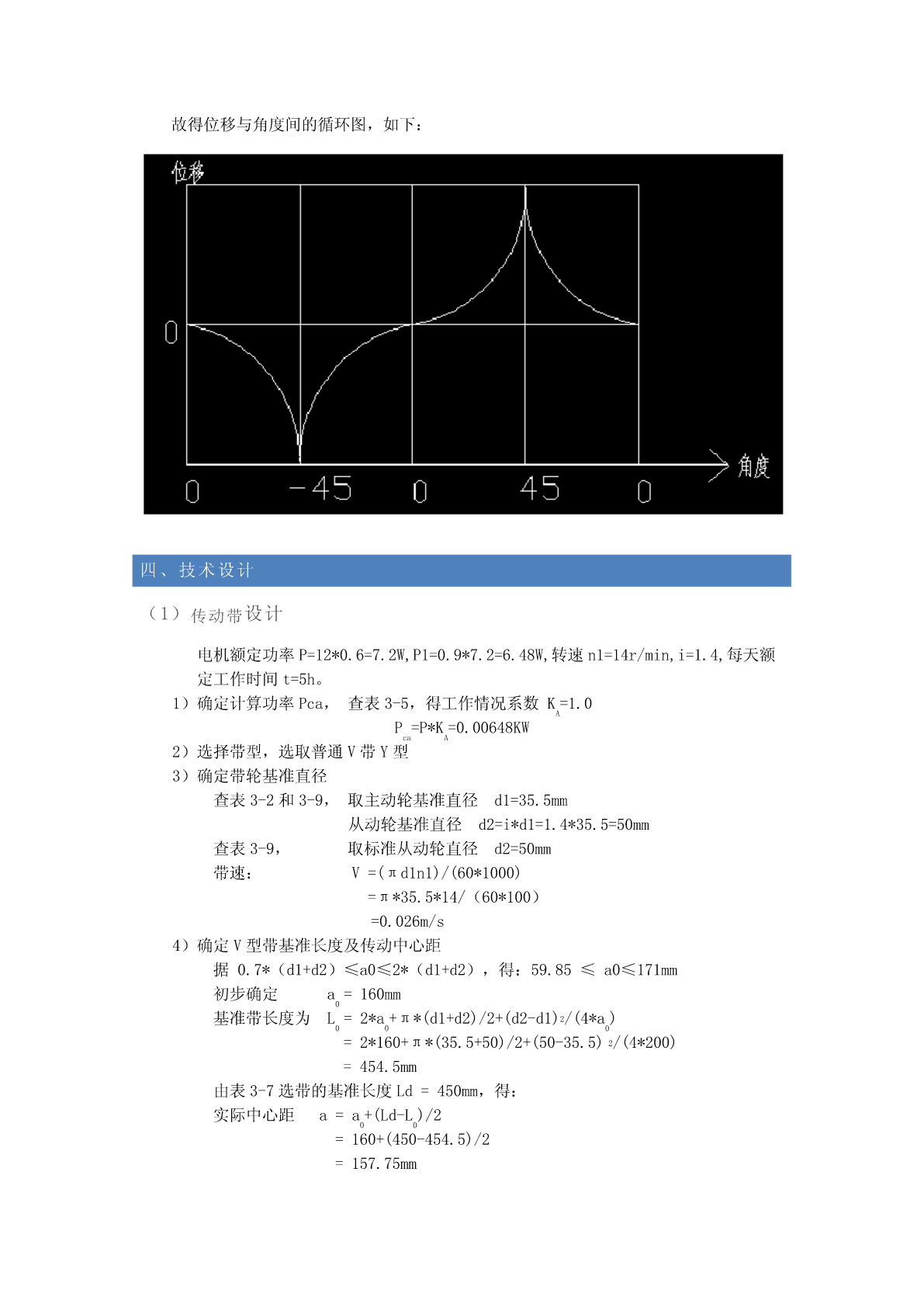
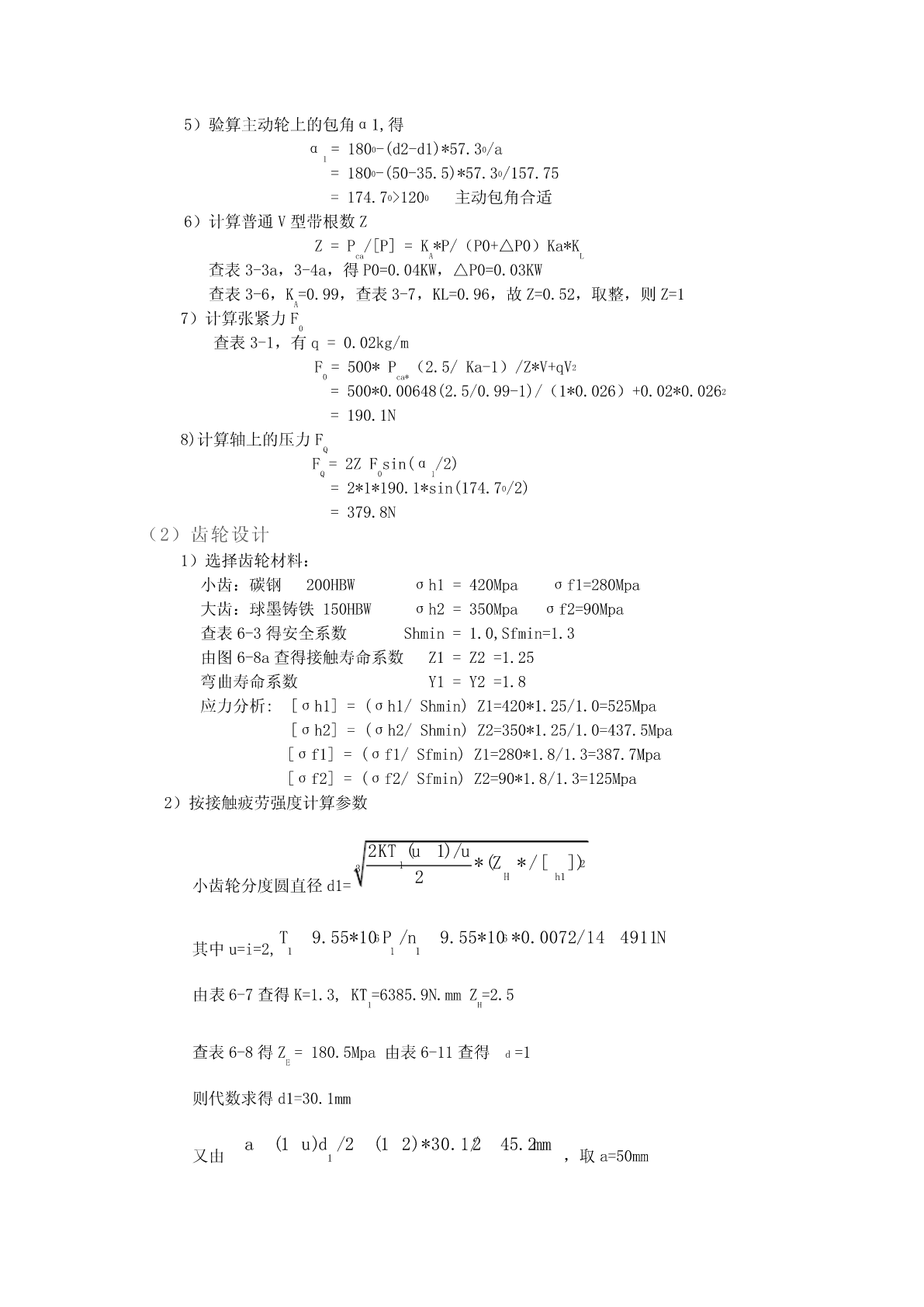
汕头大学工学院二级项目报告(第三阶段)项目名称:机械传动设计项目题目:机械臂带传动设计指导教师:系别:机电系专业:机械设计制造及其自动化姓名:组长:XXX成员:XXXXXXXXXXXXXXXXXXXXXXX阶段时间:2009年12月04日至12月15日成绩:评阅人:传动系统的设计一、设计题目块状物抓取搬运是流水线等工作场合中时常所需的流程之一。机械臂可以在较高程度上满足这一要求,现即须设计一机械臂关节的传动系统。该系统的传动过程如下,电机为动力源,通过一对齿轮减速后,再由一条同步带将动力传至该机械臂某一关节处。该电机可以通过正反转的控制来实现关节处的正反转控制。二、原始数据与设计要求1)动力源为电机,具有快速响应,精确步进等特点2)机构具有较稳定的传动比3)关节处实现90度转动的时间不超过5秒钟4)同步带的传动距离为200~300mm5)传动系统输出端力矩至少达到10N*M部分参数值估算如下:6)关节所属的一截机械臂重量为1kg,长度为300mm,7)关节转速为W=30度/秒三、总体设计(1)机械工作原理本机械臂由步进电机的驱动带传动。机械臂由底座、支架、三组运动臂动臂(图一)及功能手(夹取模块,图二)组成。图一图二(2)运动原理图如下图所示,电机1的转动通过齿轮1把力矩传给齿轮2,齿轮2通过键传动带动大臂的上下摆动。电机2的转动通过带轮1(带轮1与齿轮4紧固连接,与大臂轴是间隙连接)把转矩传给带轮2,从而带动小臂的运动。.(3)机械工作循环图1)机械循环如图机械臂初始角度为0,转动范围为2。现取为45度。2)工作路线简述如下:机械臂主要是抓取一个小物品,首先臂在平衡位置,工作时,往下偏移一个角度,然后回到平衡位置,再放到正角度,最后回到原位置。3)循环工作图如下4)臂位移与角度的关系(xr)2y2l2据两点间距离公式,其中X为臂上端点的横坐标,Y为纵坐标,r为臂长,l为端点位移,可得位移是条圆弧故得位移与角度间的循环图,如下:四、技术设计(1)传动带设计电机额定功率P=12*0.6=7.2W,P1=0.9*7.2=6.48W,转速n1=14r/min,i=1.4,每天额定工作时间t=5h。1)确定计算功率Pca,查表3-5,得工作情况系数K=1.0AP=P*K=0.00648KWcaA2)选择带型,选取普通V带Y型3)确定带轮基准直径查表3-2和3-9,取主动轮基准直径d1=35.5mm从动轮基准直径d2=i*d1=1.4*35.5=50mm查表3-9,取标准从动轮直径d2=50mm带速:V=(πd1n1)/(60*1000)=π*35.5*14/(60*100)=0.026m/s4)确定V型带基准长度及传动中心距据0.7*(d1+d2)≤a0≤2*(d1+d2),得:59.85≤a0≤171mm初步确定a=160mm0基准带长度为L=2*a+π*(d1+d2)/2+(d2-d1)2/(4*a)000=2*160+π*(35.5+50)/2+(50-35.5)2/(4*200)=454.5mm由表3-7选带的基准长度Ld=450mm,得:实际中心距a=a+(Ld-L)/200=160+(450-454.5)/2=157.75mm5)验算主动轮上的包角α1,得α=1800-(d2-d1)*57.30/a1=1800-(50-35.5)*57.30/157.75=174.70>1200主动包角合适6)计算普通V型带根数ZZ=P/[P]=K*P/(P0+△P0)Ka*KcaAL查表3-3a,3-4a,得P0=0.04KW,△P0=0.03KW查表3-6,K=0.99,查表3-7,KL=0.96,故Z=0.52,取整,则Z=1A7)计算张紧力F0查表3-1,有q=0.02kg/mF=500*P(2.5/Ka-1)/Z*V+qV20ca*=500*0.00648(2.5/0.99-1)/(1*0.026)+0.02*0.0262=190.1N8)计算轴上的压力FQF=2ZFsin(α/2)Q01=2*1*190.1*sin(174.70/2)=379.8N(2)齿轮设计1)选择齿轮材料:小齿:碳钢200HBWσh1=420Mpaσf1=280Mpa大齿:球墨铸铁150HBWσh2=350Mpaσf2=90Mpa查表6-3得安全系数Shmin=1.0,S