如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
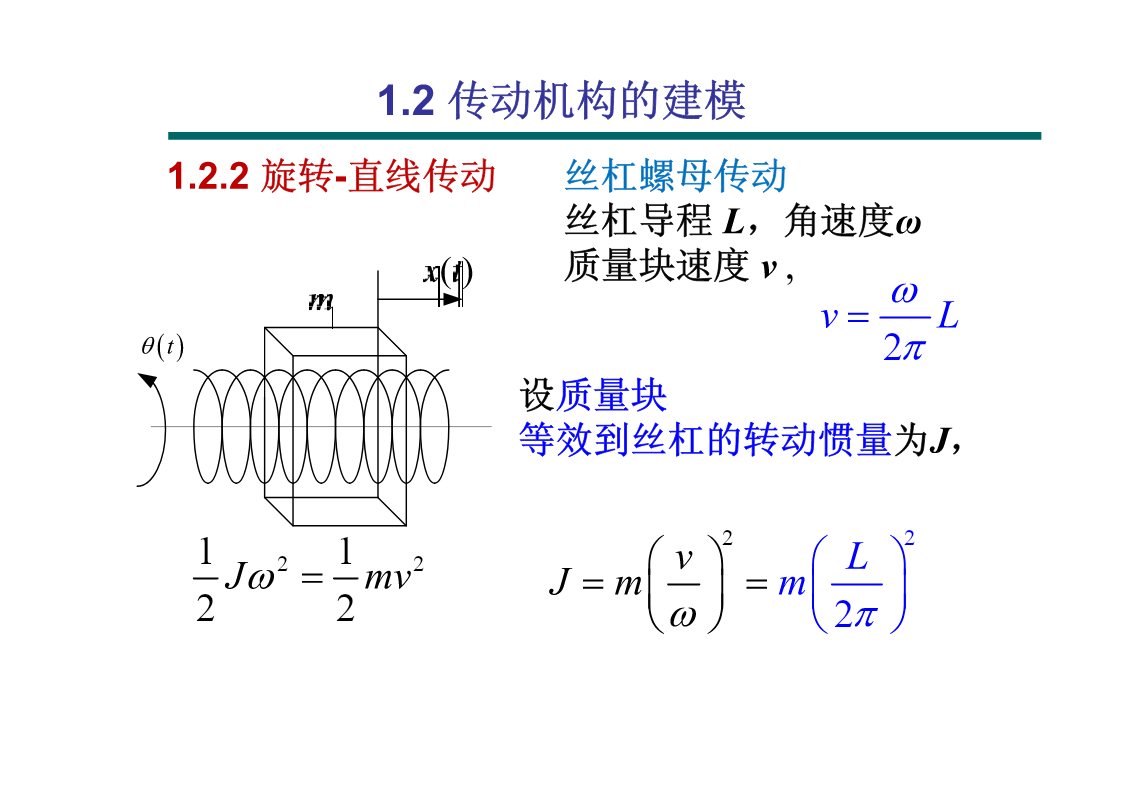
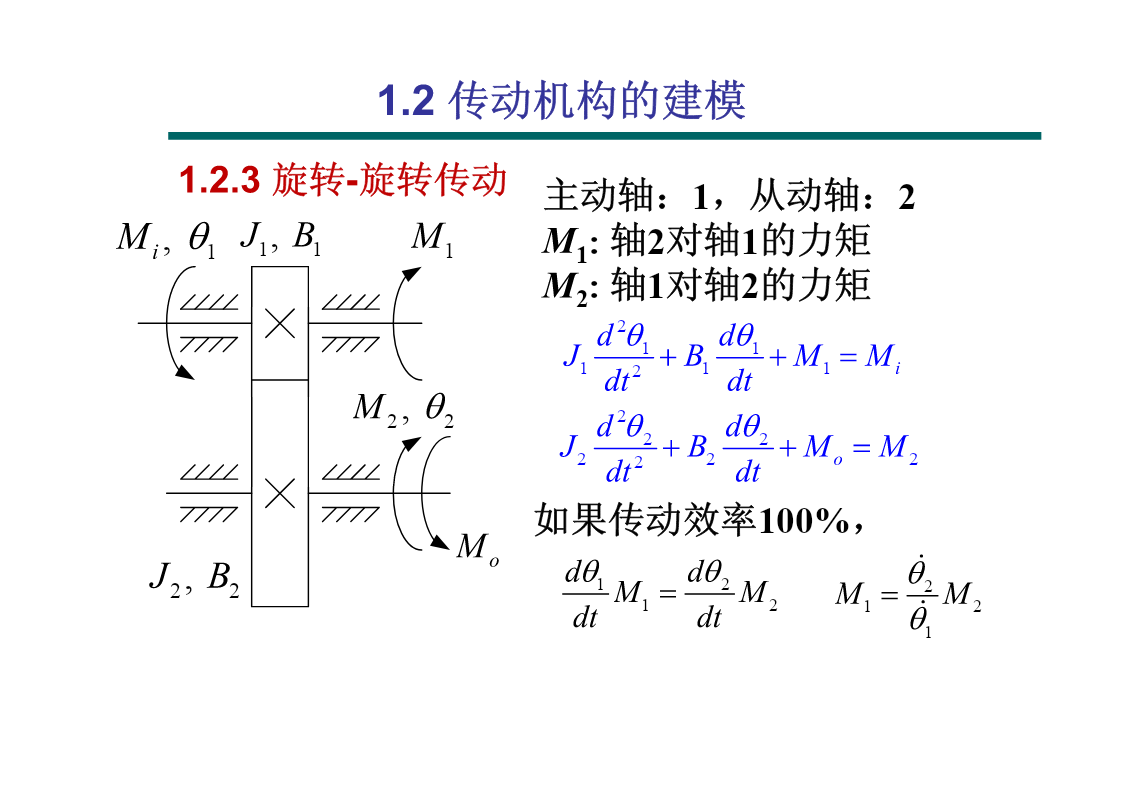
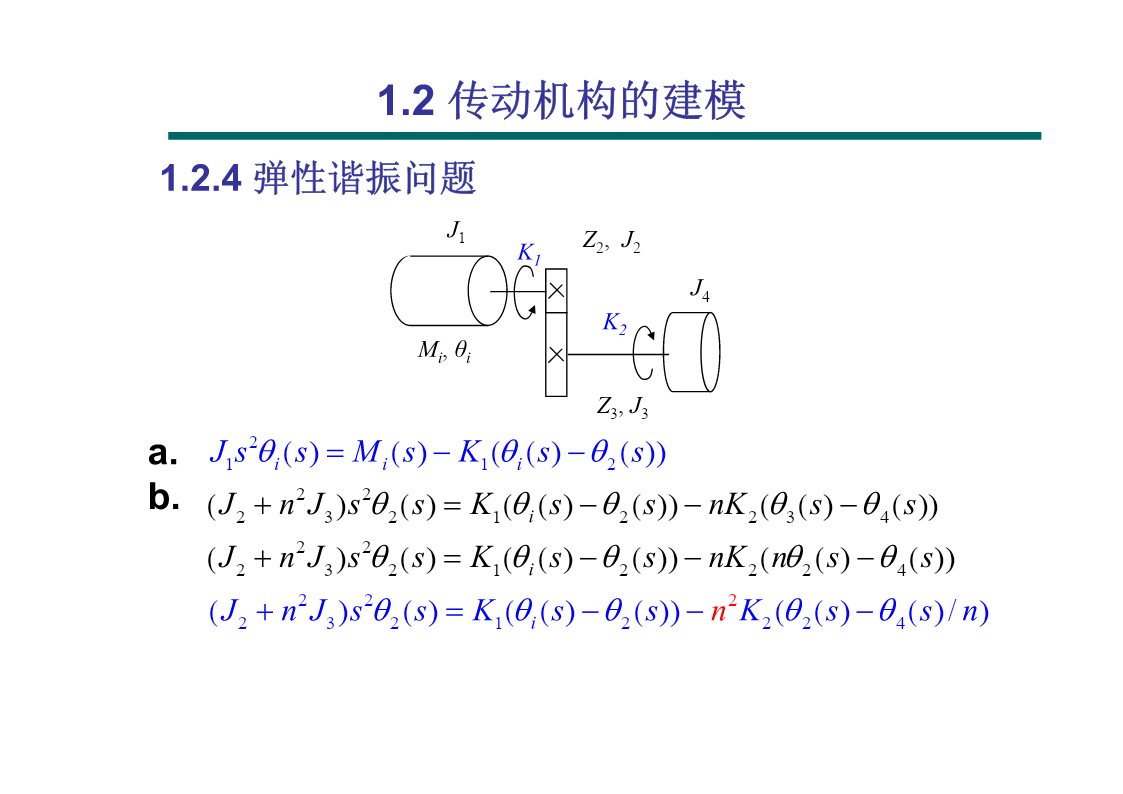
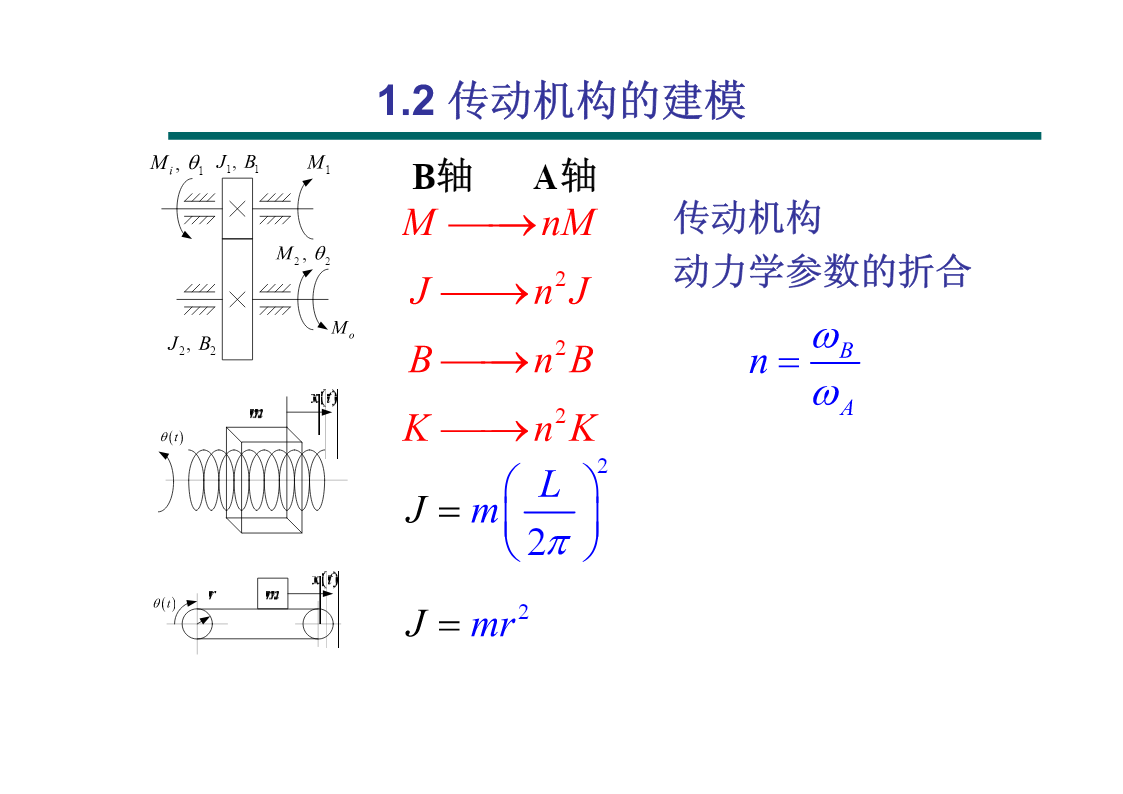
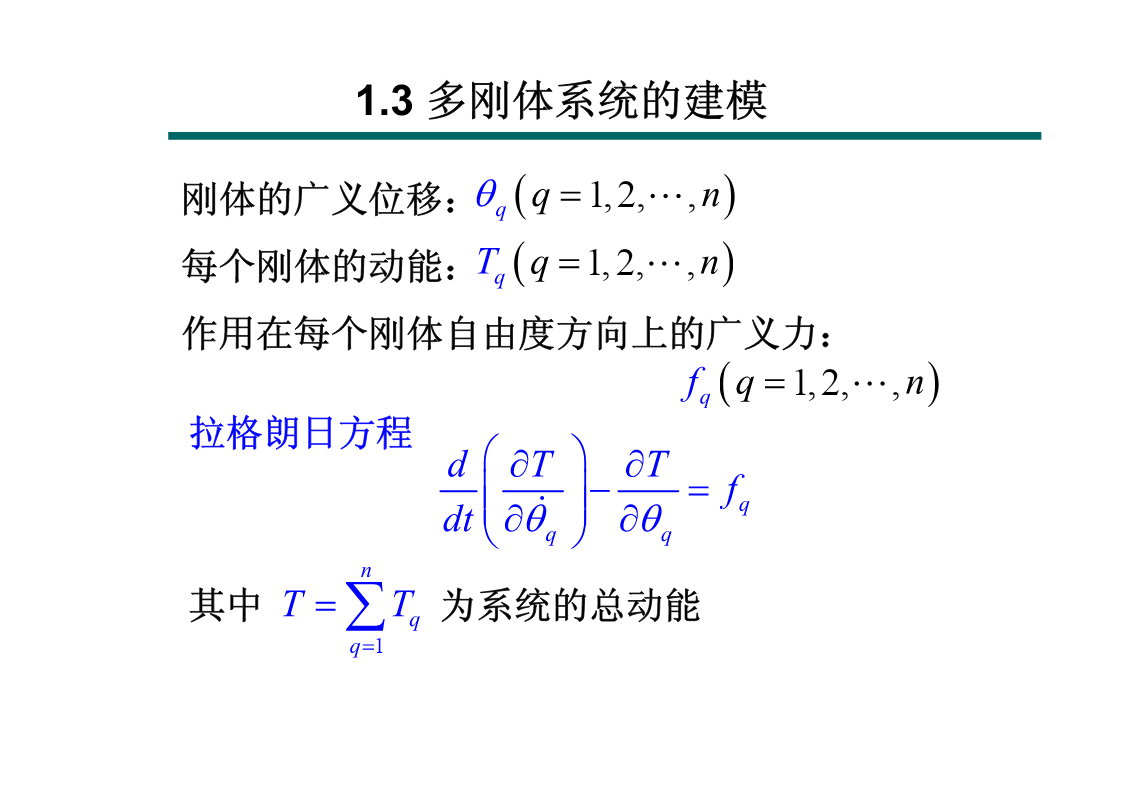
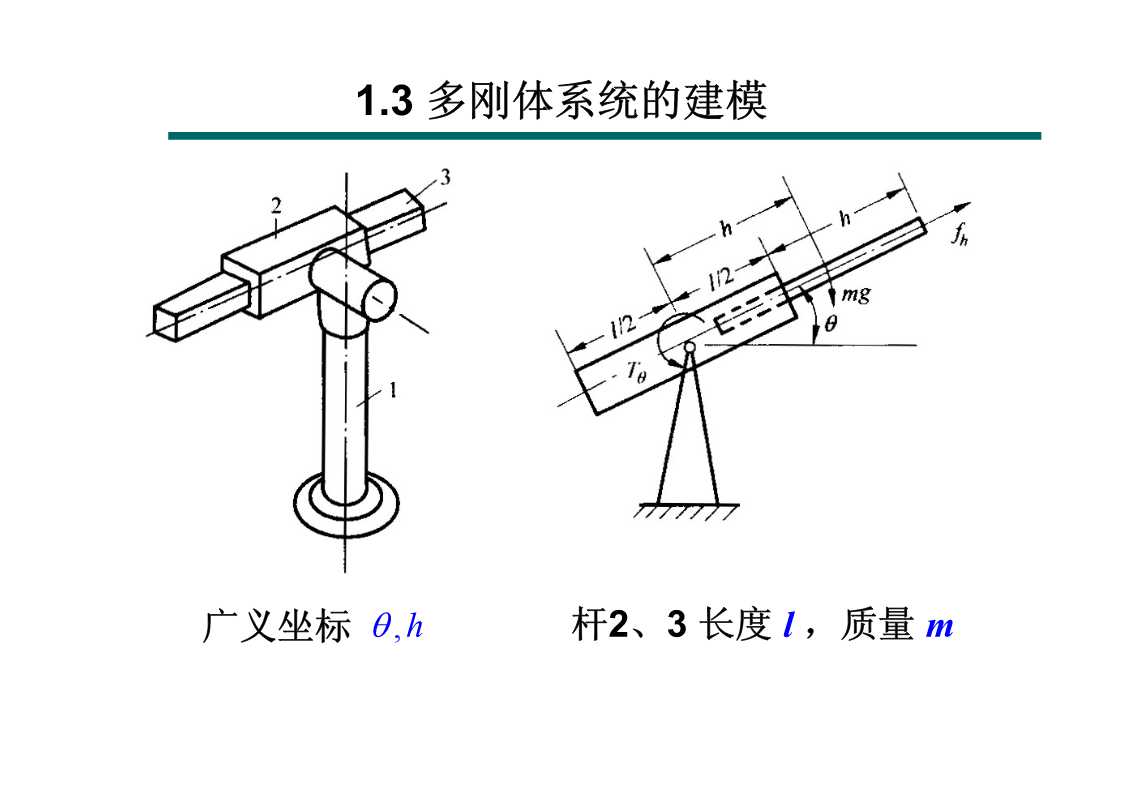
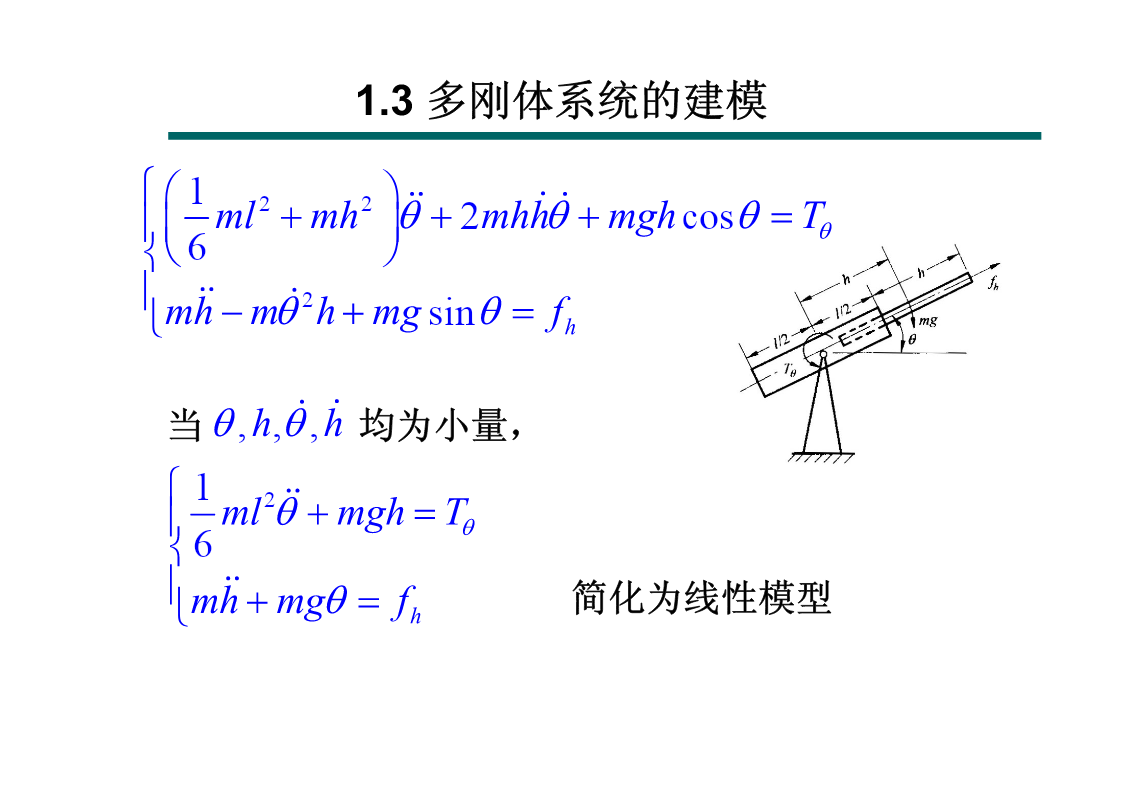
机电控制工程1.机电系统建模1.1控制工程基础知识1.2传动机构的建模131.3多刚体系统的建模1.4微机电系统的建模1.2传动机构的建模1.2.2旋转-直线传动丝杠螺母传动丝杠导程L,角速度ω质量块速度v,ωv=Lθ()t2π设质量块等效到丝杠的转动惯量为J,221122⎛⎞v⎛⎞LJmvω=J=m⎜⎟=m⎜⎟22⎝ω⎠⎝2π⎠1.2传动机构的建模1.2.3旋转-旋转传动主动轴:1,从动轴:2JB,Mi,θ111M1M1:轴2对轴1的力矩M2:轴1对轴2的力矩dd2θθJBMM11++=111dt2dtiM,θ222ddθθJBMM22++=22dt2dto2如果传动效率100%,Moddθθθ&JB22,122M12=MM12=Mdtdtθ&11.2传动机构的建模1.2.4弹性谐振问题J1Z2,J2K1J4K2Mi,θiZ3,J32a.Js112θθθii()s=−M()sK(i()s−())sb.22(JnJssKssnKss2321+=−−−)()(()())(()())θθθi2234θθ22(JnJssK2321+=−−−)()(()())(()())θθθθθis2snKns224s222()()(()())(()()/)JnJssK2321+=−−−θθθθθis2snK22sn4s1.2传动机构的建模M,θJ,BMi1111B轴A轴MMM⎯⎯→nM传动机构M,θ22动力学参数的折合J⎯⎯→nJ2MJB,oω22B⎯⎯→nB2n=Bω2Aθ(t)K⎯⎯→nK2⎛⎞LJ=m⎜⎟⎝⎠2πθt()J=mr21.机电系统建模1.1控制工程基础知识1.2传动机构的建模131.3多刚体系统的建模1.4微机电系统的建模1.3多刚体系统的建模刚体的广义位移:θq(qn=1,2,L,)每个刚体的动能:Tq(qn=1,2,L,)作用在每个刚体自由度方向上的广义力:fq(q=1,,,2,,L,n)拉格朗日方程dT⎛⎞∂∂T−==f⎜⎟qdt⎝⎠∂∂θθ&qqn其中TT=∑q为系统的总动能q=11.3多刚体系统的建模广义坐标θ,h杆2、3长度l,质量m1.3多刚体系统的建模⎧⎛⎞122⎪⎜⎟ml+++mhθθ&&2cosmhh&&mghθ=Tθ⎨⎝⎠6⎪2⎩mh&&−+mθθ&h+mgsin=fh当θ,,,hhθ&&均为小量,⎧12⎪mlθ&&+=mghTθ⎨6⎪简化为线性模型⎩mh&&+=mgθfh试验建模方法无人直升机航向控制模型ω通过控制尾桨桨叶偏转角度实现航向控制无人直升机航向控制模型尾桨控制信号脉宽直升机航向无人直升机航向控制模型a.直接对原始数据做辨识Matlab:identA(q)y(t)=B(q)u(t)+e(t)A(q)=1-3.66q-1+5.01q-2-3.03q-3+0.692q-4B(q)=-0.0683+0.205q-1-0.214q-2+0.0772q-3Measuredandsimulatedmodeloutput32031030029028027026025011.522.5Time无人直升机航向控制模型零极点分布有1个极点在单位圆外?无人直升机航向控制模型输入去偏置输出做微分500Fin-50-10000.511.5500-50Ω-100-15000.511.5Time/s无人直升机航向控制模型Ω(z)−+0.07866z0.1372控制量到角速度:=X(zz)2−1.706z+0.741Measuredandsimulated(--)modeloutputPoles(x)andZeros(o)20100.5-20-400-60-0.5-80-100-1-1-0.500.511.52-12011.522.5Time无人直升机航向控制模型输入、输出信号的Ω(s)−+2.80s41.0=各阶微分的线性组合Xs()s2+6.46s+25.3搜索极小值Order21500Input-50-10000.511.550Fit0real-50Ω-100-15000.511.5Time/s1.机电系统建模1.4微机电系统的建模1.4.1弹性非线性1421.4.2偏置梳齿结构中的静电力