如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
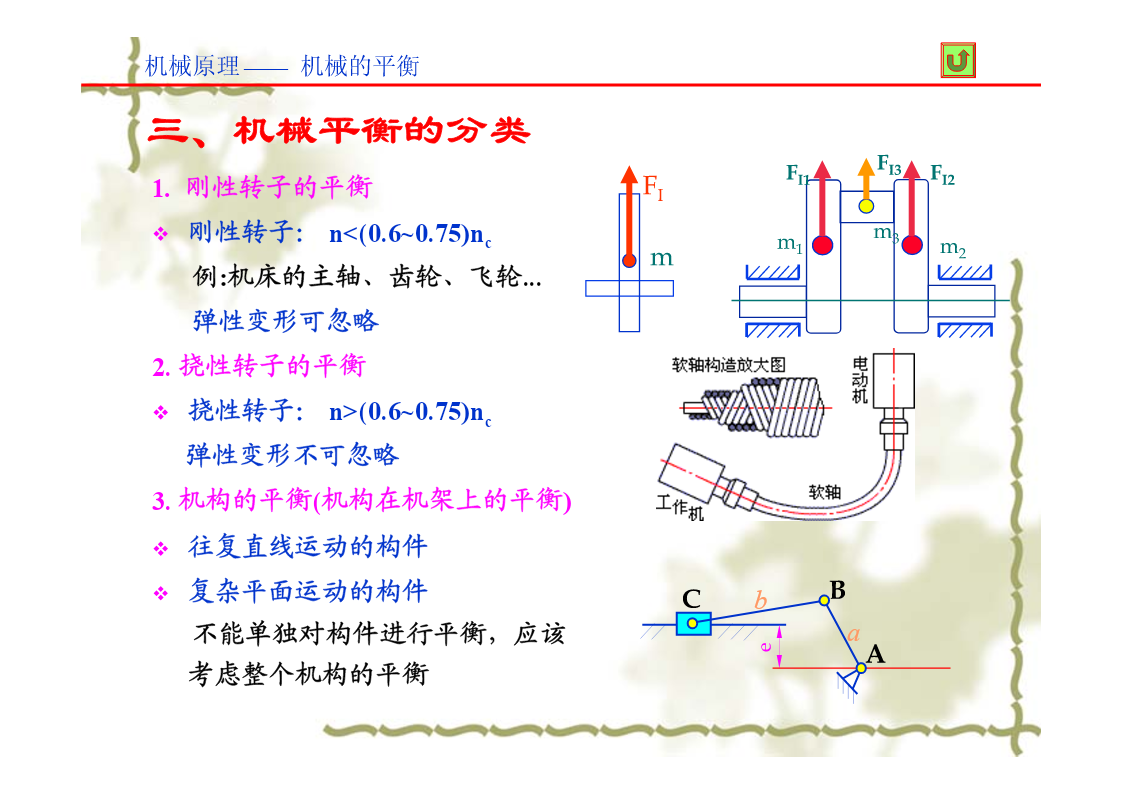
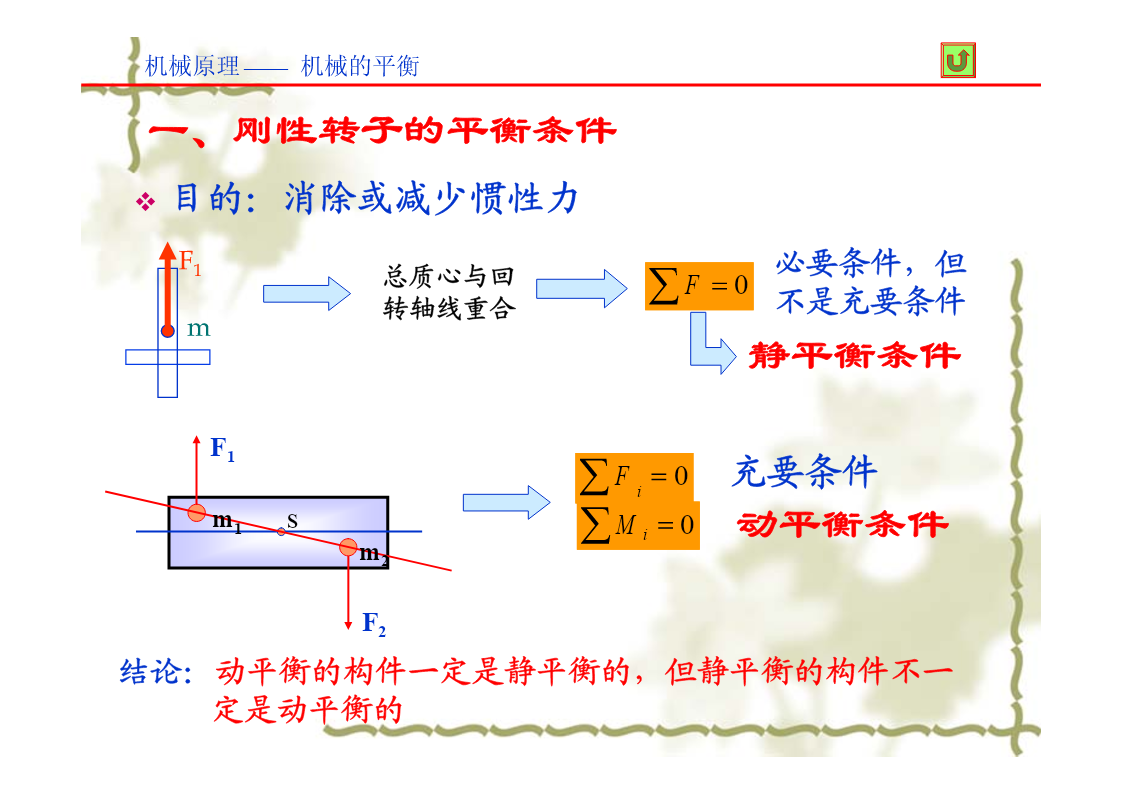
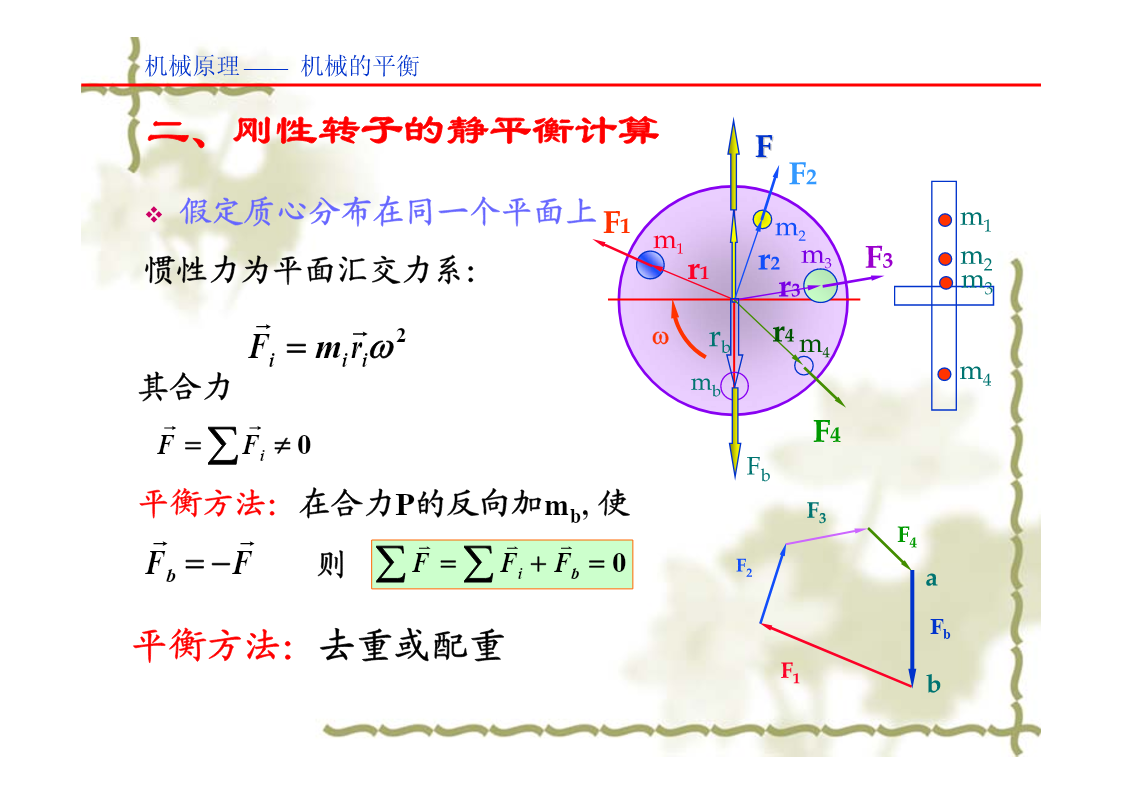
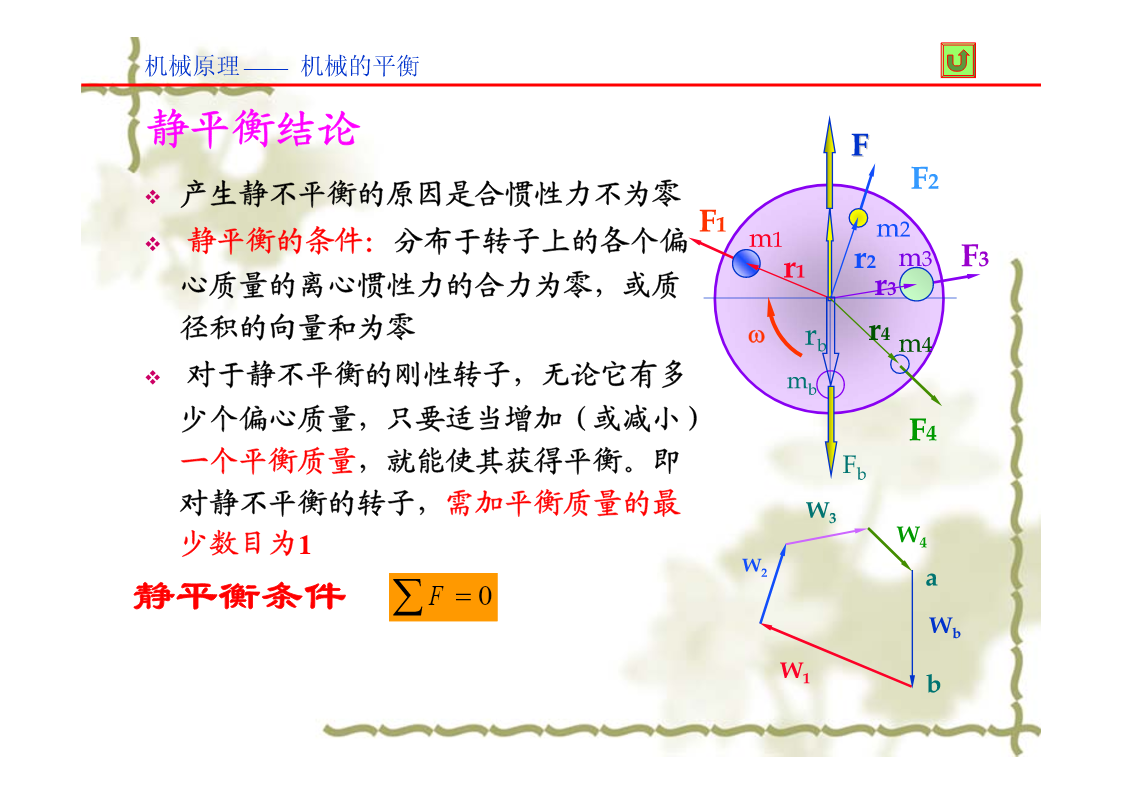
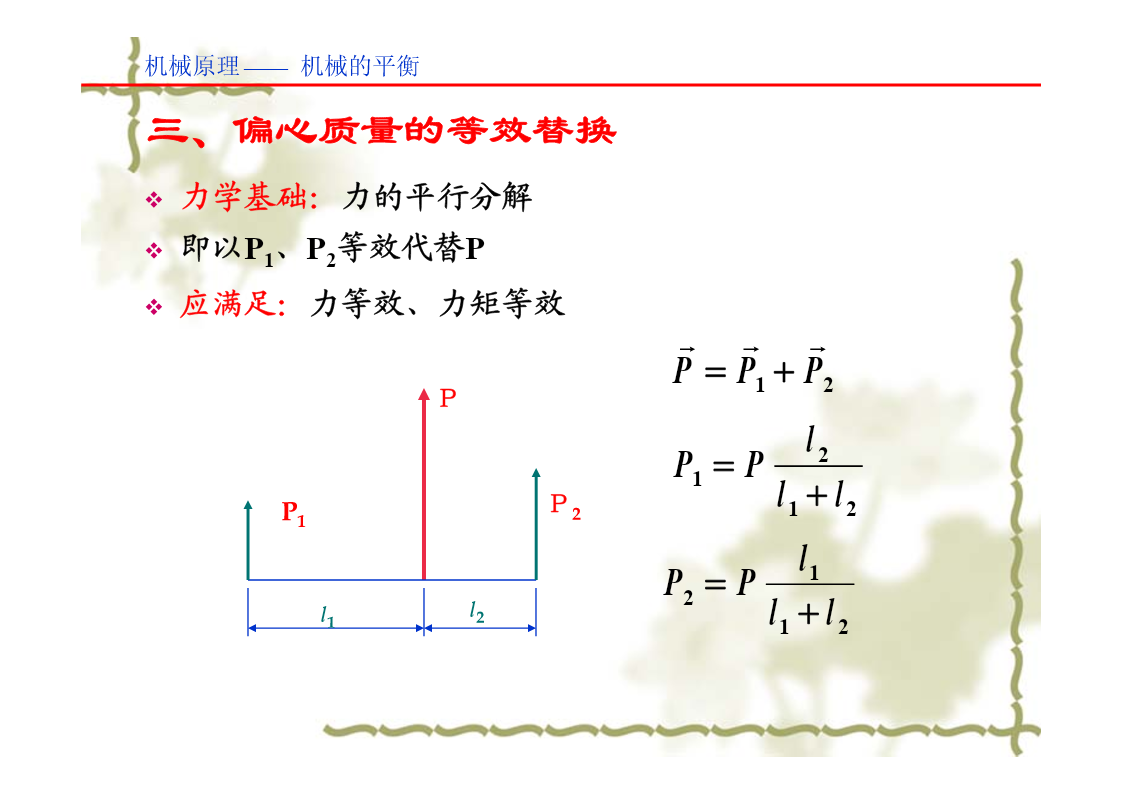
机械原理——机械的平衡第第66章章机械的平衡机械的平衡6-1机械平衡的目的及内容6-2刚性转子的平衡计算6-3刚性转子的平衡实验6-4转子的许用不平衡量6-5平面机构的平衡基本要求:•了解机械平衡的目的及分类•熟练掌握刚性转子静、动平衡的原理和方法•明确转子许用不平衡量的意义•了解平面四杆机构的平衡原理机械原理——机械的平衡一、惯性力及其影响运动的构件按运动形态可分为三类:定轴转动、往复直线运动、复杂平面运动构件在运动过程中都将产生惯性力或惯性力偶矩,除外:1)等速直线运动的构件2)质量分布对其转动轴线完全对称的等速转动构件不平衡后果:产生附加动压力→摩擦↑、磨损↑、效率↓、振动噪音↑...影响机械的工作精度、可靠性、寿命...造成破坏性事故机械原理——机械的平衡二、机械平衡的目的消除或减少惯性力机械原理——机械的平衡三、机械平衡的分类FI3FI1FI21.刚性转子的平衡FIm刚性转子:n<(0.6~0.75)ncm3m1m2例:机床的主轴、齿轮、飞轮...弹性变形可忽略2.挠性转子的平衡挠性转子:n>(0.6~0.75)nc弹性变形不可忽略3.机构的平衡(机构在机架上的平衡)往复直线运动的构件复杂平面运动的构件CbB不能单独对构件进行平衡,应该aeA考虑整个机构的平衡机械原理——机械的平衡四、机械平衡的方法1、平衡设计设计阶段从结构上采取措施,进行平衡设计2、平衡试验通过试验的方法加以平衡机械原理——机械的平衡一、刚性转子的平衡条件目的:消除或减少惯性力F必要条件,但1总质心与回F=0转轴线重合∑不是充要条件m静平衡条件F1F=0充要条件∑imS1∑Mi=0动平衡条件m2F2结论:动平衡的构件一定是静平衡的,但静平衡的构件不一定是动平衡的机械原理——机械的平衡二、刚性转子的静平衡计算FF2假定质心分布在同一个平面上m1F1m2m12m3F3m2惯性力为平面汇交力系:r1rr3m3r2ω4rrbrmFi=miriω4m4其合力mbrrF4F=∑Fi≠0Fb平衡方法:在合力的反向加使Pmb,F3rrvvvF4则F=F+F=0FFb=−F∑∑ib2aF平衡方法:去重或配重bF1b机械原理——机械的平衡静平衡结论FF2产生静不平衡的原因是合惯性力不为零F1m2静平衡的条件:分布于转子上的各个偏m12m3F3r1r心质量的离心惯性力的合力为零,或质r3径积的向量和为零ωr4rbm4对于静不平衡的刚性转子,无论它有多mb少个偏心质量,只要适当增加(或减小)F4一个平衡质量,就能使其获得平衡。即Fb对静不平衡的转子,需加平衡质量的最W3少数目为1W4W2a静平衡条件∑F=0WbW1b机械原理——机械的平衡三、偏心质量的等效替换力学基础:力的平行分解即以P1、P2等效代替P应满足:力等效、力矩等效rrrP=P+PP12l2P1=PPl1+l2P12l1P2=Pll12l1+l2机械原理——机械的平衡偏心质量的等效替换和平衡F1F将质量m(向径r)的偏心质量用另外两个平面F2m1,m,r的质量m1(r1),m2(r2)等效代替r1m2,r2F=F1+F2⎫mr=mr+mr⎬1122⎭0=F1⋅l1−F2⋅l2m1r1l1=m2r2l2m,b1mb,mb2,rb2m1r1=mrl2lrb1rmr=mrllbF221Fb2b1Fb分别在两个平面内加上平衡质量使之静平衡rrrrF1+Fb1=0F2+Fb2=0对任意一个偏心质量,可在另外两个回转平面内分别安装平衡质量,即可使转子达到平衡。机械原理——机械的平衡四、刚性转子的动平衡计算动平衡条件:F1’FF1’’vr1M=0m’,∑F=0∑1m1’’,r1’’r1’m1将所有质量向另外两个平面投m2影(等效替换)m’’,m2’,2r’’''''''r2’F22m1=m1l1l1m1=m1l1l1F2’F2’’''''''m2=m2l2l2m2=m2l2l2LL最后在两个平面内加上平衡质量使之静平衡'r''r'm''rr''+m''rr''=0平面1∑miri+mbrb=0平面2∑iibb机械原理——机械的平衡动平衡结论产生动不平衡的原因是合惯性力、合惯性力偶矩均不为零(特殊情况下,合惯性力为零,而合惯性力偶矩