如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
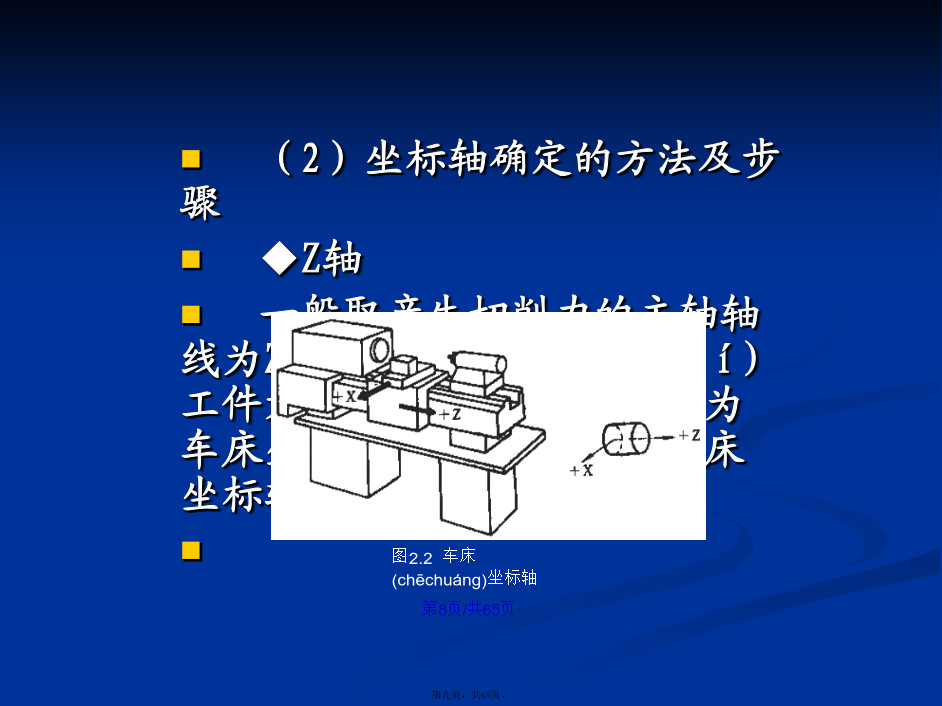
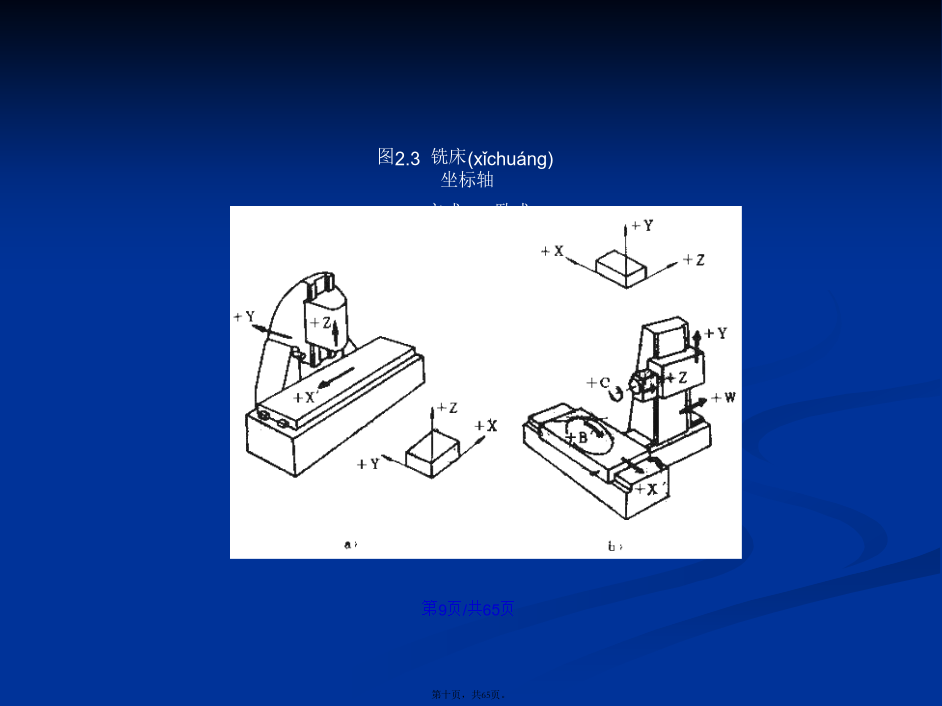
会计学第二章数控机床(shùkònɡjīchuánɡ)的编程规则本章(běnzhānɡ)知识数控机床的坐标系及其运动方向数控机床程序编制的内容及步骤数控机床程序组成及程序段格式数控机床程序编制常用的程序字数控装置所用(suǒyònɡ)的计算机属于专用计算机,它使用的自动控制语言与通用计算机使用的BASIC、FOTRAN等高级语言属于不同的范畴。尽管这种自动控制语言也像高级语言那样有严格的规则和格式,但它没有类似高级语言那样的语法。数控系统的种类繁多(SIEMENS、FANUC、KND、DMG、华中等),它们使用的数控语言规则和格式也不尽相同,编制数控加工程序时,应严格按照机床编程手册中的规定进行程序的编制。1.标准坐标系及其运动方向为了保证数控机床的正确运动,避免工作时的不一致性,我国根据ISO841国际标准制定的JB3051—82数控标准,统一规定了数控机床坐标轴的代码及其运动的正、负方向,这给数控系统和机床的设计(shèjì)、使用和维修带来了极大的方便。(1)规定原则(yuánzé)◆右手直角坐标系标准的坐标系为右手直角坐标系,如图2.1所示。*它规定了X、Y、Z三坐标轴的关系:用右手的拇指、食指和中指分别代表X、Y、Z三轴,3个手指互相垂直,所指方向分别为X、Y、Z轴的正方向。围绕X、Y、Z各轴的回转运动分别用A、B、C表示,其正向用右手螺旋定则确定。与+X、+Y、+Z、……,+C相反的方向用带“'”的+X'、+Y'、+Z'、……,+C'表示。图2.1右手(yòushǒu)直角坐标系◆刀具运动坐标系与工件运动坐标系数控机床的坐标系是机床运动部件进给运动的坐标系。由于进给运动可以是刀具相对工件的运动(车床),也可以是工件相对刀具的运动(铣床(xǐchuáng))。所以统一规定:用字母不带“‘”的坐标表示刀具相对“静止”工件而运动的刀具运动坐标;带“’”的坐标表示工件相对“静止”刀具而运动的工件运动坐标。◆运动的正方向是使刀具与工件之间距离增大的方向。(2)坐标轴确定的方法及步骤◆Z轴一般取产生切削力的主轴轴线为Z轴,刀具远离(yuǎnlí)工件方向为正向,图2.2所示为车床坐标轴,图2.3所示为铣床坐标轴。图2.3铣床(xǐchuáng)坐标轴a)立式b)卧式◆X轴一般位于平行工件装卡面的水平面内。对工件作回转切削运动的机床(车床、磨床),在水平面内取垂直工件回转轴线(Z轴)的方向为X轴,刀具远离工件方向为正向,如图2.2所示。*对刀具作回转切削运动的机床(铣床、镗床(tángchuáng)),当Z轴竖直(立式)时,人面对主轴,向右为正X方向,如图2.3a所示;当Z轴水平(卧式)时,则向左为正X方向,如图2.3b所示。*◆Y轴根据已确定的X、Z轴,按右手直角坐标系确定。◆A、B、C轴此三轴为回转进给运动坐标。根据已确定的X、Y、Z轴,用右手螺旋法则来确定。◆附加坐标若机床(jīchuáng)除有X、Y、Z(第一组)主要直线运动外,还有平行于它们的坐标运动,则分别命名为U、V、W。2.数控机床两种坐标系(1)机床坐标系机床坐标系又称机械坐标系,是机床运动部件的进给运动坐标系,其坐标轴及方向按标准规定,其坐标原点的位置则由各机床生产厂设定。数控车床的机床坐标系(XOZ)的原点O一般(yībān)位于卡盘端面,如图2.4所示。*数控铣床的机床坐标系(XYZO)的原点O一般(yībān)位于机床零点,即机床移动部件沿其坐标轴正向的极限位置,如图2.5所示。*图2.4车床(chēchuáng)的两种坐标系(2)工件坐标系工作坐标系又称编程坐标系,供编程使用。规定工件坐标系是刀具相对工件而运动的刀具运动坐标系。如图2.4中的XpOpZp及图2.5中XpYpZpOp。*工件坐标系的原点Op,也称工件零点或编程零点,其位置由编程者设定(shèdìnɡ),一般设在工件的设计、工艺基准处,便于尺寸计算。1.数控机床编程概述(ɡàishù)(1)程序编制的内容及一般步骤◆确定工艺过程及工艺路线既要按照一般的工艺原则确定加工方法,划分加工阶段,选择机床、夹紧定位方法、加工路线(如对刀点、换刀点、进给路线)刀具、切削用量等工艺参数(如进给速度、主轴转速、切削宽度和切削深度等),又要根据数控机床加工特点,做到工序集中、换刀次数少、空行程路线短等。◆计算(jìsuàn)刀具轨迹的坐标值根据零件的形状、尺寸、走刀路线,计算(jìsuàn)出零件轮廓线上各几何元素的起点、终点、圆弧的圆心坐标。若数控系统无刀具补偿功能,则应计算(jìsuàn)刀心位置。当用直线、圆弧来逼近非圆曲线时,应计算(jìsuàn)曲线上各节点的坐标值。◆编写零件加工程序根据所计算出的刀具运动轨迹坐标值和已确