如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
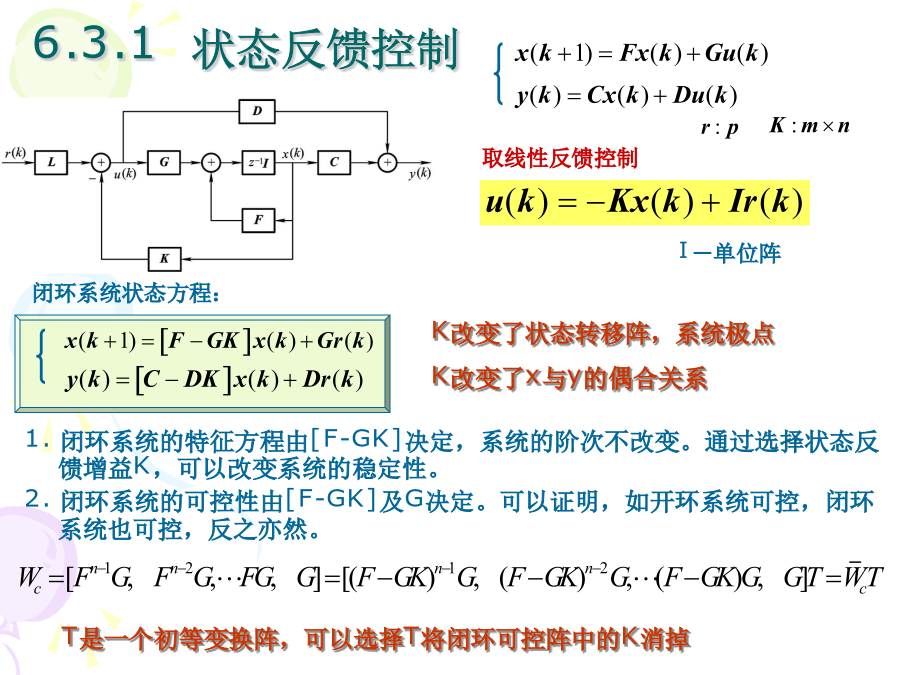
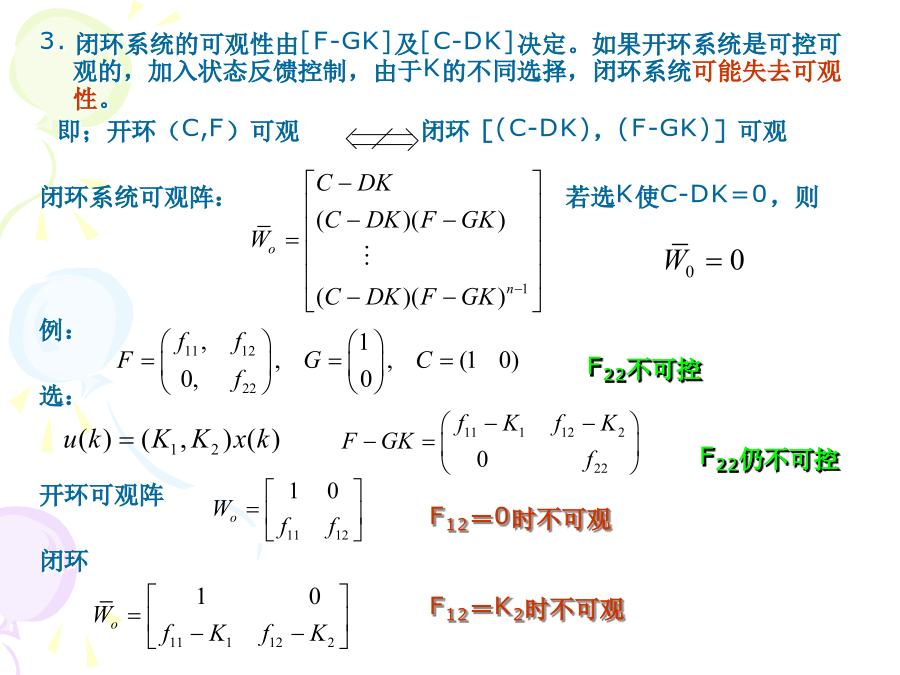
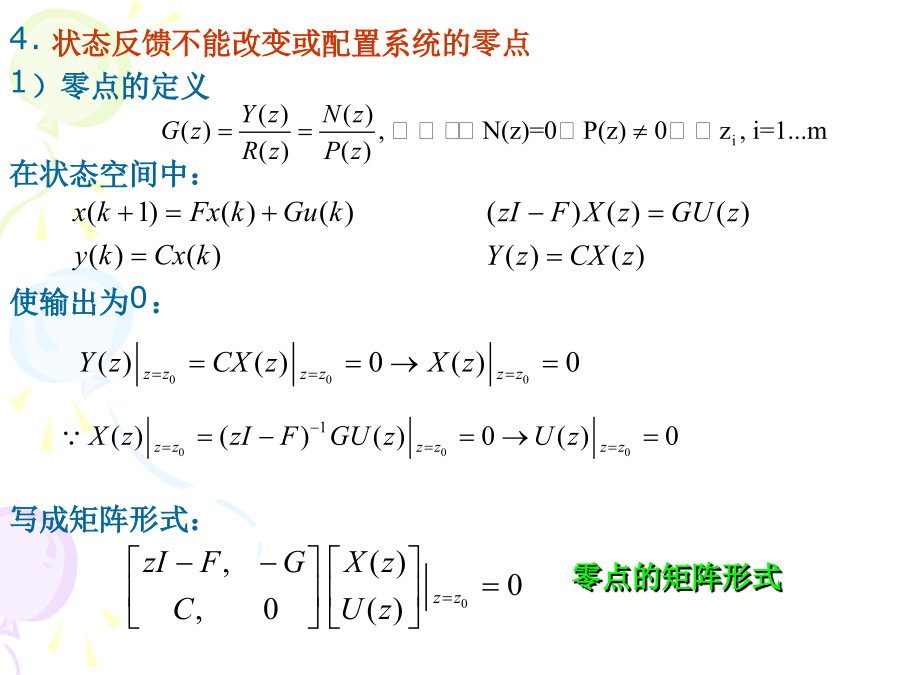
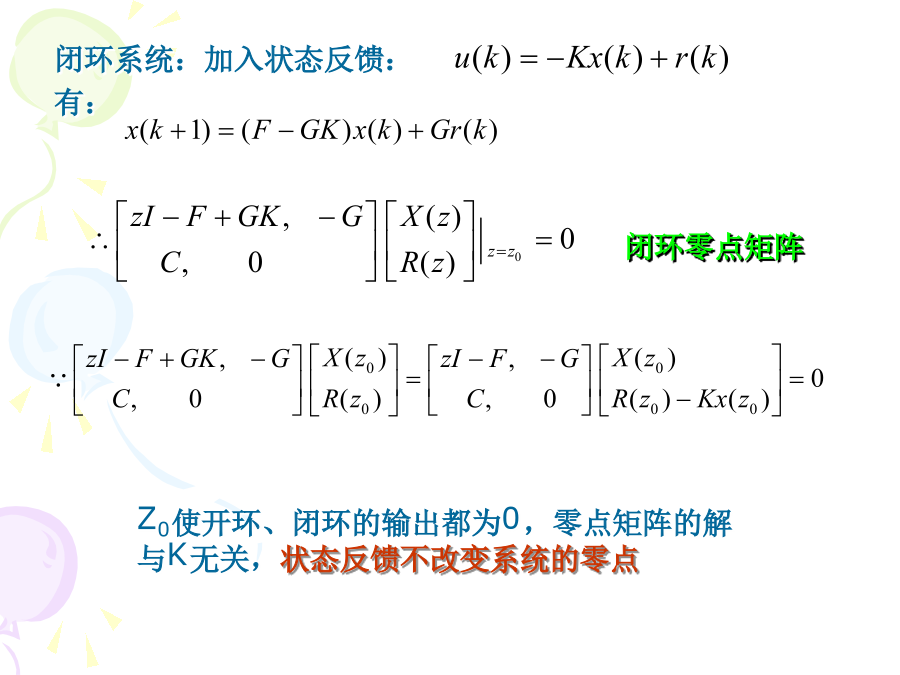
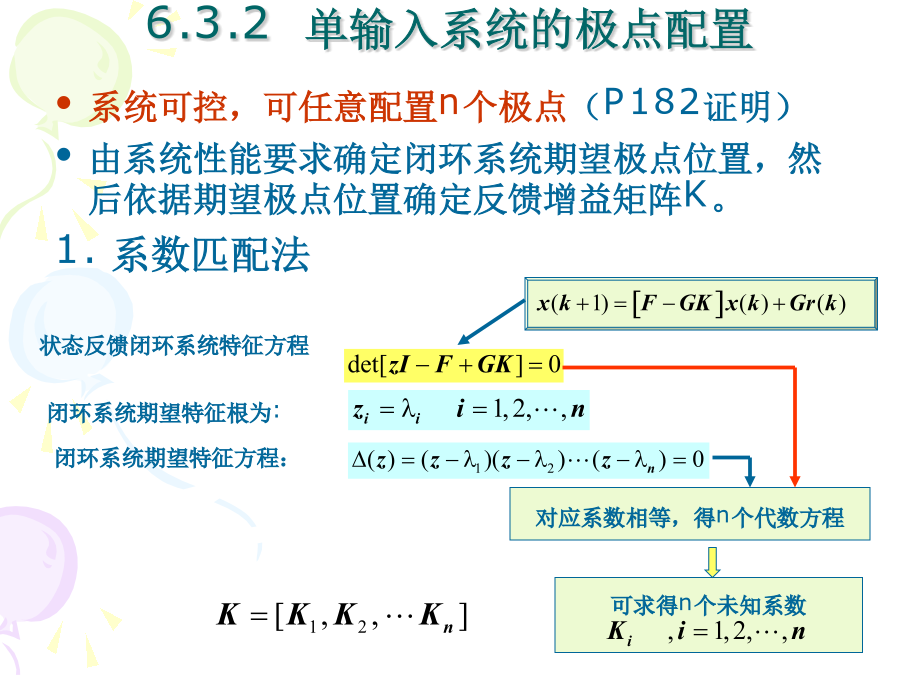
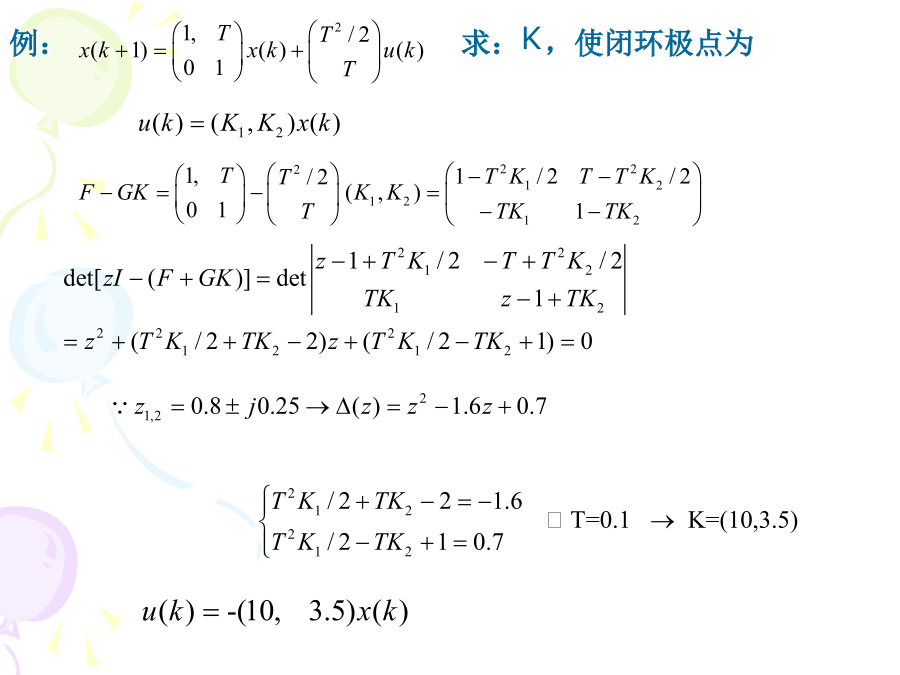
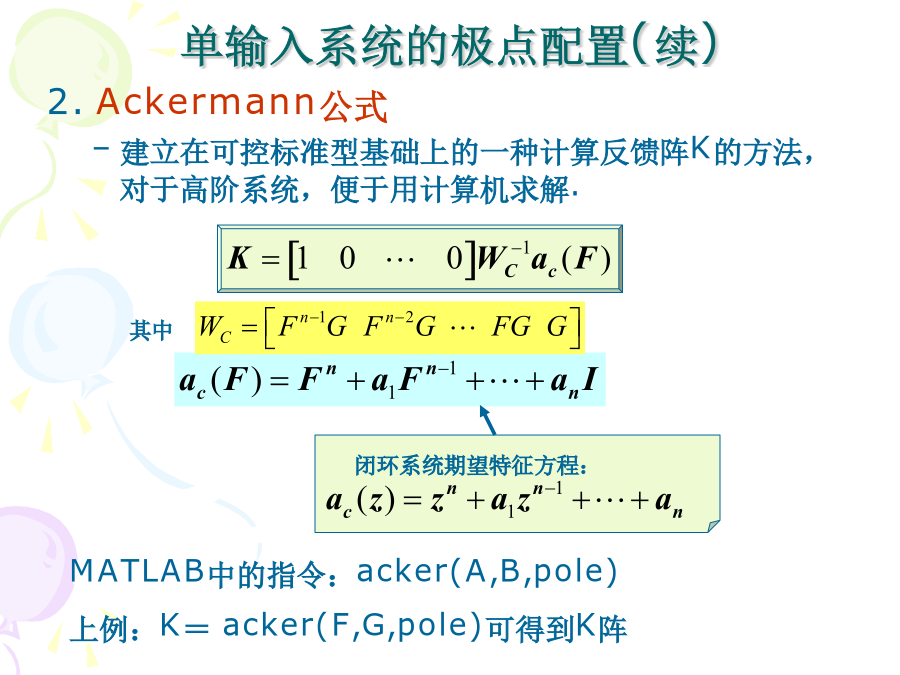
第6章计算机控制系统的状态空间设计6.3.1状态反馈控制3.闭环系统的可观性由[F-GK]及[C-DK]决定。如果开环系统是可控可观的,加入状态反馈控制,由于K的不同选择,闭环系统可能失去可观性。即;开环(C,F)可观闭环[(C-DK),(F-GK)]可观闭环系统可观阵:若选K使C-DK=0,则例:选:开环可观阵闭环4.状态反馈不能改变或配置系统的零点1)零点的定义在状态空间中:使输出为0:写成矩阵形式:闭环系统:加入状态反馈:有:6.3.2单输入系统的极点配置例:求:K,使闭环极点为z1,2=0.8j0.25解:取对应系数相等:最终得:单输入系统的极点配置(续)3.使用极点配置方法的注意问题6.3.3多输入系统的极点配置第6章计算机控制系统的状态空间设计状态观测器6.4.1系统状态的开环估计6.4.2全阶状态观测器设计(闭环估计)观测误差产生的原因(1)构造观测器所用的模型(数学模型)参数与真实系统(物理系统)的参数不可能完全一致(2)观测器与对象的初始状态很难一致,总存在初始误差,一般设观测值(3)外干扰、测量噪声→有稳态误差状态观测器极点配置的目的,使估计偏差6.4.2全阶状态观测器设计(续)现今值观测器与预测观测器比较观测器设计:计算观测器增益L例:求:L阵使观测器极点为解:(1)预测观测器(2)现今值观测器若期望极点:最小拍观测器,2T内误差到0现今值:预测:多输出系统的观测器6.4.3降维状态观测器6.4.3降维状态观测器降维观测器方程:观测器与状态反馈互为转置第6章计算机控制系统的状态空间设计6.5.1调节器设计分离原理分离定理:观测误差是x和其估计值的线性组合,可作为新的独立变量令:可得新的组合系统6.5.2观测器极点的选择原则6.5.3调节器设计6.5.3调节器设计调节器系统方框图第6章内容结束!第6章习题:6-16-56-6