如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
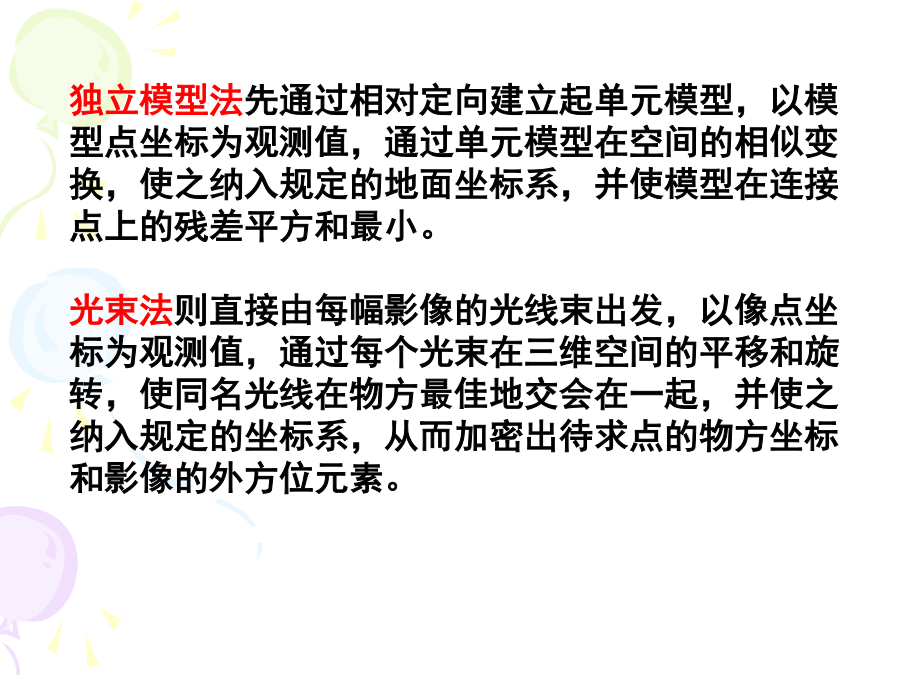
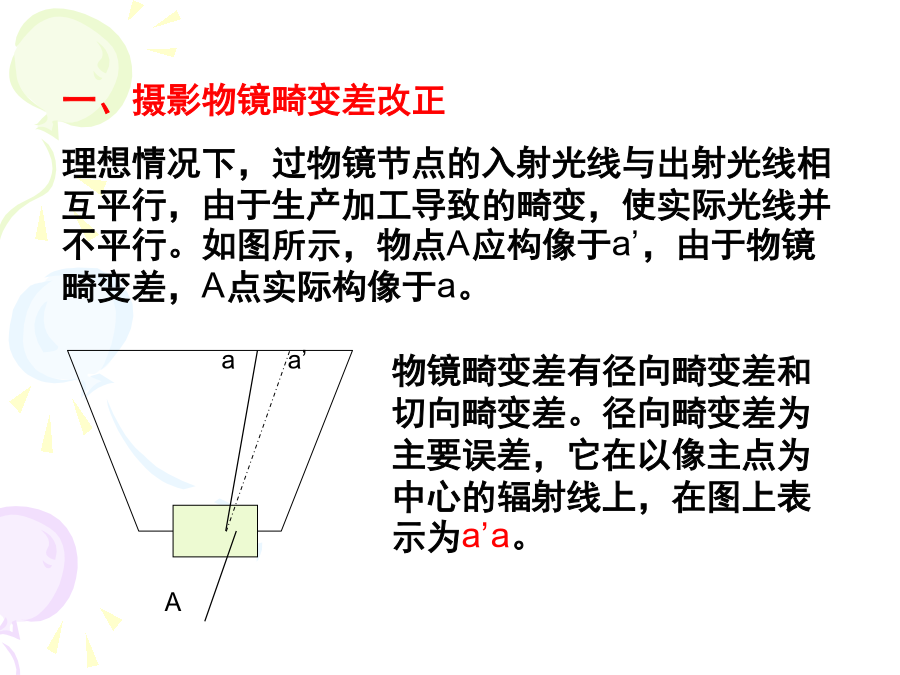
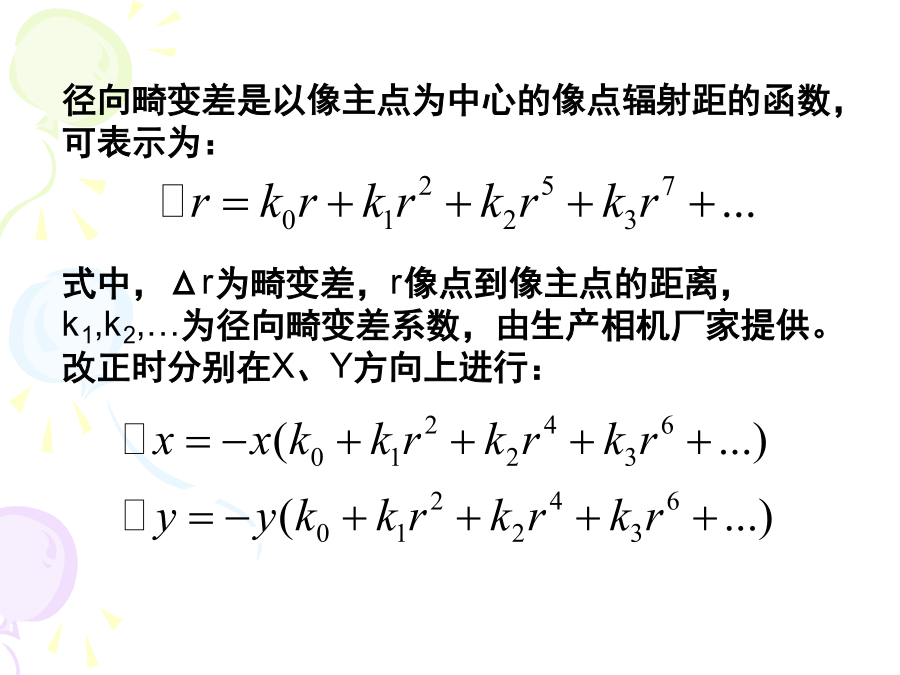
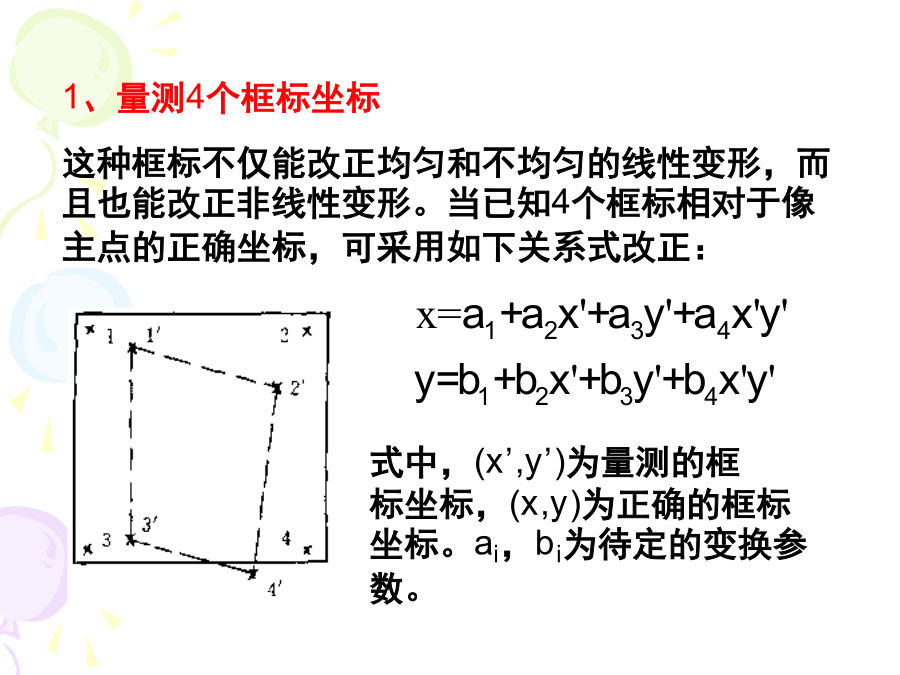
《摄影测量学》第四章主要内容:1、像点坐标系统误差预改正2、单航带解析空中三角测量3、航带法区域网空中三角测量4、独立模型法区域网空中三角测量5、光束法区域网空中三角测量6、带有附加参数的光束法区域网平差解析空中三角测量概述:在双像立体测图中,每个像对需要4个测图控制点,当测区内有许多个立体像对时,则需要大量的地面控制点。如果这些点都采用野外实测,则野外工作量大、成本高、效率低。在绝大数的情况下,为了减少外业的工作量,在野外只测少量必要的地面控制点,而采用在室内用摄影测量的方法加密出每个立体像对所需要的测图控制点,这种工作称为空中三角测量。解析空中三角测量根据平差中采用的数学模型,可分为航带法解析空中三角测量、独立模型法解析空中三角测量和光束法解析空中三角测量。航带法通过相对定向和模型连接建立自由航带,以点在航带中的摄影测量坐标为观测值,通过非线性多项式中参数的确定,使自由网纳入地面坐标系,使公共点上不符的平方和最小。独立模型法先通过相对定向建立起单元模型,以模型点坐标为观测值,通过单元模型在空间的相似变换,使之纳入规定的地面坐标系,并使模型在连接点上的残差平方和最小。光束法则直接由每幅影像的光线束出发,以像点坐标为观测值,通过每个光束在三维空间的平移和旋转,使同名光线在物方最佳地交会在一起,并使之纳入规定的坐标系,从而加密出待求点的物方坐标和影像的外方位元素。第4章解析空中三角测量§4-1像点坐标系统误差预改正一、摄影物镜畸变差改正理想情况下,过物镜节点的入射光线与出射光线相互平行,由于生产加工导致的畸变,使实际光线并不平行。如图所示,物点A应构像于a’,由于物镜畸变差,A点实际构像于a。径向畸变差是以像主点为中心的像点辐射距的函数,可表示为:二、摄影材料变形改正摄影材料在摄影、摄影处理、保存等过程中都会产生不同程度的变形。这类变形非常复杂,难以用一严格的数学模型恰当表示,从总的变形分析,它是由均匀变形、不均匀变形和偶然的局部变形的综合影响。均匀和不均匀变形对一张像片的影响,可看作像幅的增大或缩小。可通过量测框标坐标或框标距来进行改正。1、量测4个框标坐标这种框标不仅能改正均匀和不均匀的线性变形,而且也能改正非线性变形。当已知4个框标相对于像主点的正确坐标,可采用如下关系式改正:像点改正的步骤为:a、先精确量测框标样片上的4个框标坐标。b、相应地在航片上量出4个框标的坐标。c、利用改正公式,可列出8个方程。d、解算变换参数。e、按各像点坐标,利用改正公式,计算各改正后的像点坐标。2、量测4个框标距这种框标能改正均匀和不均匀的伸缩。当已知两对边框标的距离时,可采用如下关系式改正:三、大气折光改正大气的密度随高度增加而减小,空气的折射率随高度增大而逐渐减小,因而光线的路径不是一条直线。大气折光引起像点在辐射方向的改正为:四、地球曲率改正地球曲率的影响是不破坏物像间的中心投影的另一种变形。大地水准面是一椭球面,利用像片建立的如图,大地水准面上的A点构像于a点,过N的水平坐标面上有A’点,A’N=,A’点构像于a’,a’在a的幅射线上。由地球曲率引起的像点坐标在辐射方向的改正为:最后,经摄影物镜畸变差、摄影材料变形、大气折光差和地球曲率改正后的像点坐标为:第4章解析空中三角测量§4-2单航带解析空中三角测量二、航线网的建立1、计算第一个像对的连续系统相对方位元素,并计算出各模型点和右摄站在航线坐标系S1-XYZ中的坐标。设航线中第一个像对左摄站为S1,右摄站为S2。取航线的第一张像片的像空间坐标系S1-xyz作为航线坐标系S1-XYZ,后续航片的像空辅坐标取与S1-XYZ平行。此时,航线的第一片在S1-XYZ中的角元素都为零,所以左片像空间坐标系在航线坐标系中的旋转矩阵M11为单位阵(第一个1表示左片,若为2表示右片,第二个1表示模型的顺序号,M21表示第一个模型右片的旋转矩阵)。用(X,Y,Z)和(X′,Y′,Z′)分别表示一对同名像点在各自的像空辅坐标系中的坐标,则像空辅坐标为:式中,2、计算第二个像对连续系统相对方位元素,并算出各模型点和右摄站在航线坐标系S2-XYZ中坐标。此时,用前一模型右片的旋转矩阵M21作为本模型左片的旋转矩阵M12,即M12=M21,计算第三片相对于第二片的相对定向元素。则同名像点在像空辅坐标S2-XYZ和S3-XYZ中的坐标为:本像对中各模型点和右摄站在S2-XYZ中的坐标为:显然按上述方法计算出的同一点分别在相邻模型中的单模型坐标是不一致的。其原因是各单模型坐标的原点不统一,另外,各模型BX值都是分别假设的,因而模型的比例尺也不统一。原点不一致可通过坐标平移的方法解决,各模型间比例尺不一致,则要适当缩放以后各模型的比例尺,使得各模型都与第一个