如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
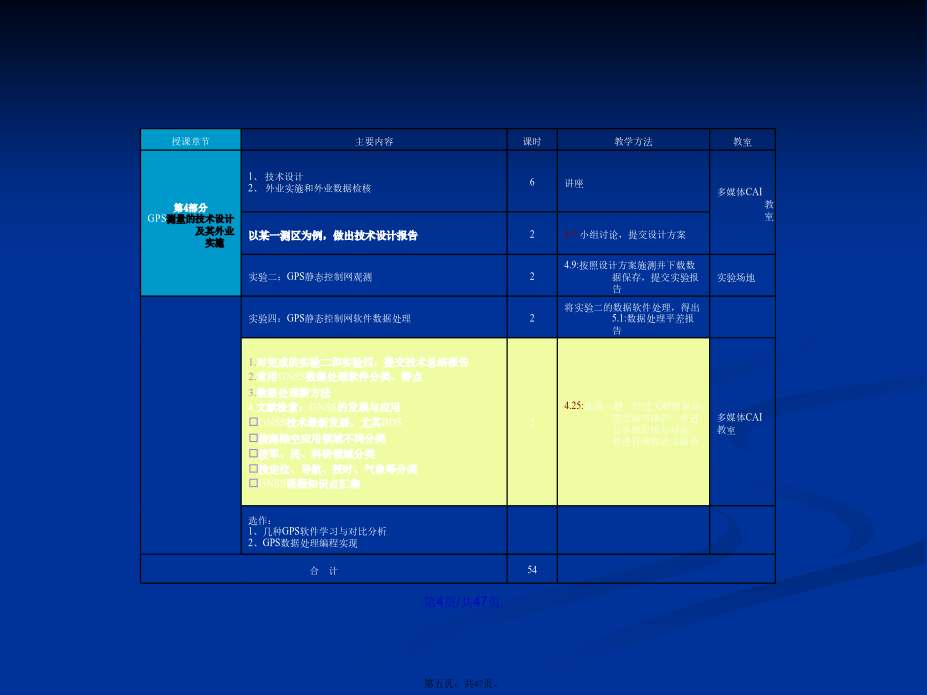
会计学我国成功发射(fāshè)首颗新一代北斗导航卫星第5章距离(jùlí)测量与GPS定位1.定位方法分类按参考点的不同位置绝对定位(单点定位):在地球协议坐标系中,确定观测站相对地球质心的位置。相对定位:在地球协议坐标系中,确定观测站与地面某一参考点之间的相对位置。在绝对定位和相对定位中,又都包含静态(jìngtài)和动态两种形式。1.定位方法分类按用户接收机作业时所处的状态划分:静态定位:在定位过程中,接收机位置静止不动,是固定的。静止状态只是(zhǐshì)相对的,在卫星大地测量中的静止状态通常是指待定点的位置相对其周围点位没有发生变化,或变化极其缓慢,以致在观测期内可以忽略。动态定位:在定位过程中,接收机天线处于运动状态。2.观测量的基本概念上述通过码相位观测或载波相位观测所确定的站星距离都不可避免地含有(hányǒu)卫星钟与接收机钟非同步误差、电离层、对流层等的影响,含钟差影响的距离通常称为伪距。由码相位观测所确定的伪距简称测码伪距由载波相位观测所确定的伪距简称为测相伪距。2.观测量的基本概念GPS卫星信号含有多种定位信息,根据不同的要求,可以从中获得不同的观测量,主要包括:根据码相位(xiàngwèi)观测得出的伪距测码伪距根据载波相位(xiàngwèi)观测得出的伪距测相伪距由积分多普勒计数得出的伪距由干涉法测量得出的时间延迟多普勒计数法、干涉法测量,尚难以获得广泛应用采用积分多普勒计数法进行定位时,所需观测时间较长,一般数小时,同时观测过程中,要求接收机的震荡器保持高度稳定。干涉法测量时,所需设备较昂贵,数据处理复杂。2.观测量的基本概念目前广泛应用的基本观测量:码相位观测是测量GPS卫星发射的测距码信号(C/A码或P码)到达用户接收机天线(观测站)的传播时间。也称时间延迟测量。载波相位观测是测量接收机接收到的具有多普勒频移的载波信号,与接收机产生(chǎnshēng)的参考载波信号之间的相位差。2.观测量的基本概念目前广泛应用的基本观测量:C/A码码元宽度293m;P码码元宽度29.3mL1波长为19.03cm;L2波长为24.42cm;L5为25.50cm由于载波的波长远小于码长,在分辨率相同的情况下,观测误差不同载波相位(xiàngwèi)观测是目前最精确的观测方法。2.观测量的基本概念载波相位观测的主要问题无法直接测定卫星载波信号在传播路径(lùjìng)上相位变化的整周数,存在整周不确定性问题(AR,AmbiguityResolution)在接收机跟踪GPS卫星进行观测过程中,常常由于接收机天线被遮挡、外界噪声信号干扰等原因,还可能产生整周跳变现象。(CycleSlip)有关整周不确定性问题,通常可通过适当数据处理而解决,但将使数据处理复杂化。5.2载波相位(xiàngwèi)测量ij(t)=ij(t)+Nij(t0)=ij(t)+int(t)+Nij(t0)ij(t)是载波相位的实际(shíjì)观测量。Nij(t0)一般是未知的,通常称为整周未知数(整周待定值或整周模糊度)。一个整周的误差会引起19cm-26cm的距离误差。如何准确确定整周未知数,是利用载波相位(xiàngwèi)观测量进行精密定位的关键。1.测码伪距观测方程的线性化设卫星sj和观测站Ti在协议地球坐标系中瞬间空间直角坐标(zhíjiǎozuòbiāo)向量和空间直角坐标(zhíjiǎozuòbiāo)向量分别为:则站星瞬时距离为:GPS定位(dìngwèi)的几何关系进一步假设X0j(t)为卫星sj于历元t的坐标近似向量,Xi0为观测站Ti坐标近似向量,Xj(t)=[Xj(t)Yj(t)Zj(t)]T为卫星坐标改正数向量,Xi=[XiYiZi]T为观测站坐标改正数向量,同时(tóngshí)考虑观测站至卫星的方向余弦:在上式中取至一次微小项后,站星距离(jùlí)线性化形式:由此,测码伪距观测方程线性化的一般形式为:在定位数据处理中,如果把导航电文获得的卫星坐标视为固定值,则上式可简化为2.测相伪距观测(guāncè)方程的线性化由载波相位观测(guāncè)方程可得载波相位观测(guāncè)方程线性化形式(方法同前):上式中Xj(t)项,可用于估算卫星位置误差对测相伪距的影响,当采用轨道改进法进行(jìnxíng)精密定位时,可作为待估参数一并求解。当已知卫星瞬时位置时,可简化为小结(xiǎojié)第5章距离测量(cèliáng)与GPS定位5.3观测(guāncè)值的线性组合基本(jīběn)观测量及其线性组合单差single-difference---SD,即不同观测(guānc