如果您无法下载资料,请参考说明:
1、部分资料下载需要金币,请确保您的账户上有足够的金币
2、已购买过的文档,再次下载不重复扣费
3、资料包下载后请先用软件解压,在使用对应软件打开
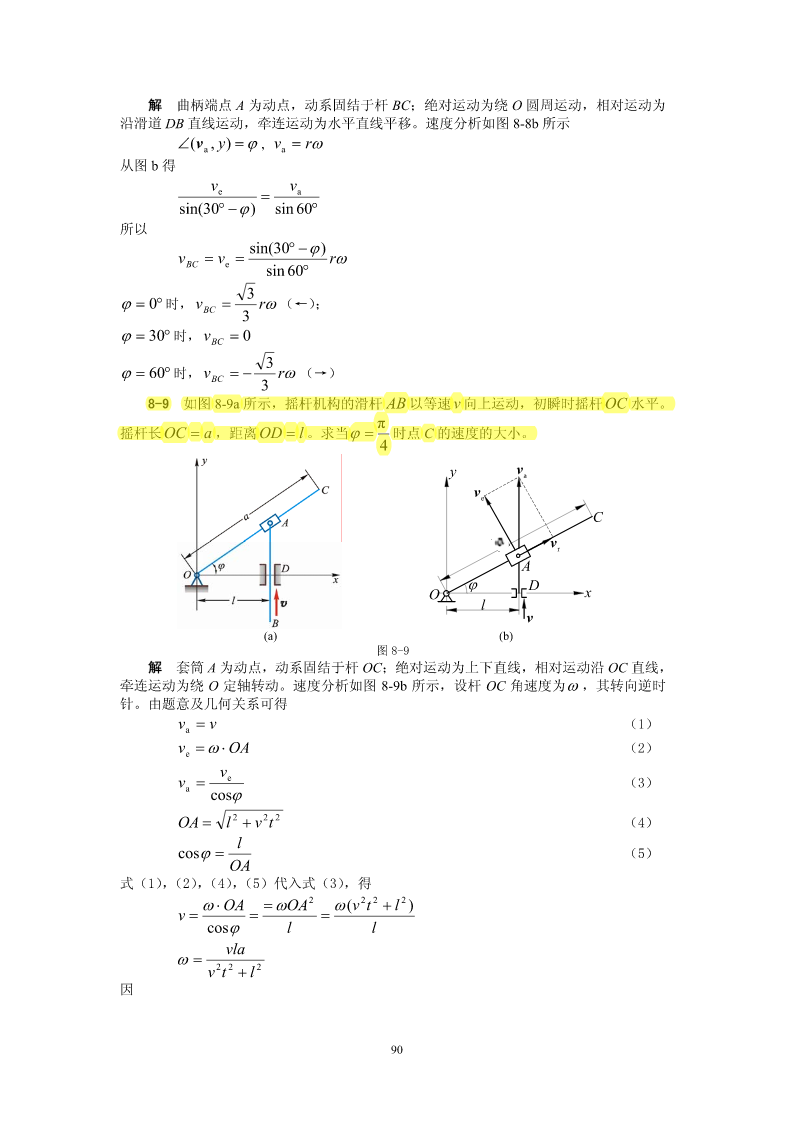
vAveAvωaBvrϕvx(a)(b)图8-5解直角推杆上与杆AO接触点B为动点,动系固结于AO;牵连运动为定轴转动,绝对运动为水平直线运动,相对运动为沿杆OA直线运动。点B速度分析如图8-5b,设OA角速度为ω,则va=v,ve=ω⋅OB=vasinϕ,ω⋅OB=vsinϕaa以sinϕ==代入上式得OBx2+a2vaω=x2+a2最终得lavv=ωl=ax2+a2方向如图。8-6车床主轴的转速n=30r/min,工件的直径d=40mm,如图8-6a所示。如车刀横向走刀速度为v=10mm/s,求车刀对工件的相对速度。vrϕvave(a)(b)图8-6解车刀头为动点,动系固结于工件;牵连运动为定轴转动,绝对运动为水平直线,相对运动为螺旋曲线。点M的牵连速度ve垂直向下,绝对速度va=v,相对速度vr在va与ve所决定的平面内,且设与va成ϕ角,如图8-6b所示。dnπv=v=10mm/s,v=⋅=62.83mm/sae230所以2222vr=va+ve=10+62.83=63.6mm/svϕ=tan−1(e)=tan−1(6.283)=80°57'va8-7在图8-7a和图8-7b所示的2种机构中,已知O1O2=a=200mm,ω1=3rad/s。求图示位置时杆O2A的角速度。88解曲柄端点A为动点,动系固结于杆BC;绝对运动为绕O圆周运动,相对运动为沿滑道DB直线运动,牵连运动为水平直线平移。速度分析如图8-8b所示∠(va,y)=ϕ,va=rω从图b得vve=asin(30°−ϕ)sin60°所以sin(30°−ϕ)v=v=rωBCesin60°3ϕ=0°时,v=rω(←);BC3ϕ=30°时,vBC=03ϕ=60°时,v=−rω(→)BC38-9如图8-9a所示,摇杆机构的滑杆AB以等速v向上运动,初瞬时摇杆OC水平。π摇杆长OC=a,距离OD=l。求当ϕ=时点C的速度的大小。4yvaveCvrAϕDOxlv(a)(b)图8-9解套筒A为动点,动系固结于杆OC;绝对运动为上下直线,相对运动沿OC直线,牵连运动为绕O定轴转动。速度分析如图8-9b所示,设杆OC角速度为ω,其转向逆时针。由题意及几何关系可得va=v(1)ve=ω⋅OA(2)vv=e(3)acosϕOA=l2+v2t2(4)lcosϕ=(5)OA式(1),(2),(4),(5)代入式(3),得ω⋅OA=ωOA2ω(v2t2+l2)v===cosϕllvlaω=v2t2+l2因90vlav=ω⋅a=Cv2t2+l2π当ϕ=时,v⋅t=l,故4vav=C2l8-10平底顶杆凸轮机构如图8-10a所示,顶杆AB可沿导轨上下移动,偏心圆盘绕轴O转动,轴O位于顶杆轴线上。工作时顶杆的平底始终接触凸轮表面。该凸轮半径为R,偏心距OC=e,凸轮绕轴O转动的角速度为ω,OC与水平线夹角ϕ。求当ϕ=0°时,顶杆的速度。ABvvaevrReϕOCω(a)(b)图8-10解(1)运动分析轮心C为动点,动系固结于AB;牵连运动为上下直线平移,相对运动为与平底平行直线,绝对运动为绕O圆周运动。(2)速度分析,如图8-10b所示va=ve+vr方向⊥OC↑←大小eω??vAB=ve=vacosϕ=eω8-11绕轴O转动的圆盘及直杆OA上均有1导槽,两导槽间有1活动销子M如图8-11a所示,b=0.1m。设在图示位置时,圆盘及直杆的角速度分别为ω1=9rad/s和ω2=3rad/s。求此瞬时销子M的速度。ve130°ω2ve2vaθM30°vOr2vr1ω1(a)(b)图8-11解(1)运动分析①活动销子M为动点,动系固结于轮O;牵连运动为绕O定轴转动,相对运动为沿轮上导槽直线,绝对运动为平面曲线。va=ve1+vr1(1)②活动销子M为动点,动系固结于杆OA;牵连运动为绕O定轴转动,相对运动为沿OA直线,绝对运动为平面曲线。91va=ve2+vr2(2)速度分析如图8-11b所示,由式(1)、(2)得ve1+vr1=ve2+vr2(3)方向⊥OM√⊥OM√大小OM⋅ω1?OM⋅ω2?式(3)向ve2方向投影,得ve1−vr1cos30°=ve2bbω−ωv−v124bv=e1e2=cos30°cos30°=(ω−ω)r1cos30°cos30°312式(3)向vr2方向投